
ID : 5346
TrackApproach
格式
TrackApproach 动作插补, 基准位置, 接近长度[, 动作选项]
指定项目
- 动作插补
- 指定动作的插补方法。指定“P”/“PTP”进行PTP插补动作,指定“L”进行CP插补动作。
- 基准位置
- 指定表示通过“TrackTargetPos”获取的跟踪对象工件的位置型数据。
也可指定在通过“TrackTargetPos”获取的位置型数据中添加了位置、姿势偏移的数据。 - 接近长度
- 使用单精度实数型数据指定接近长度。接近长度中可附加目标位置选项。
- 动作选项
- 可指定动作选项。
解说
执行追踪动作的同时,移动至距跟踪对象工件为指定距离的趋近位置。
执行该指令时,任务必须获取机器人轴的控制权。
在第2自变量“基准位置”中直接指定通过“TrackTargetPos”获取的位置型数据后,机器人的姿势变为工件夹持基本姿势。
但是,圆形跟踪时不同。
如果是圆形跟踪,从跟踪范围上游上限到机器人跟踪处的角度有多大,臂前端的姿势就旋转多大。
旋转前的姿势因第2自变量的“基准位置”而异。
将通过“TrackTargetPos”获取的位置型数据直接指定到第2自变量的“基准位置”上时,跟踪范围上流界限位置的姿势就是旋转前的姿势。
在通过“TrackTargetPos”获取的位置型数据之上加上后述的“关于姿势的补偿方法”中说明的补偿量,将其和指定到第2自变量的“基准位置”上时,在跟踪范围上流界限位置的姿势上加上补偿量后的姿势就是旋转前的姿势。
即使是圆形跟踪,也能使机器人的姿势保持通过第2自变量的“基准位置”指定的位置的姿势。
此时,通过TrackStart指令,可切换臂前端的姿势控制方法。详细内容请参照TrackStart指令的指定项目“选项设定”。
有关臂前端的指示,请参照“臂前端的姿势控制种类”。
根据视觉传感器检测到的工件朝向,修正机器人姿势时,如下所示,请通过TrackBufferRead获取视觉传感器检测到的工件姿势角度,并对第2自变量“基准位置”的姿势分量(Rx, Ry, Rz)添加修正量。
[比Ver.2.0.*更早的版本]
从缓冲区调取工件的数据,设为跟踪对象工件
P[10] = TrackTargetPos(1, -1, -1, 1)取得跟踪对象的工件的索引编号
vIndex = TrackBufferIndexes(1, 1)相对姿势分量添加工件的姿势角度
LetRZ P10 = PosRZ(P10) + TrackBufferRead(1, vIndex(0), 10)从缓冲区删除跟踪对象的工件的数据
TrackTargetRelease 1[Ver.2.0.*或更高版本]
从缓冲区调取工件的数据,设为跟踪对象工件
P[10] = TrackTargetPos(1)相对姿势分量添加工件的姿势角度
LetRZ P10 = PosRZ(P10) + TrackBufferRead(1, -1, 10)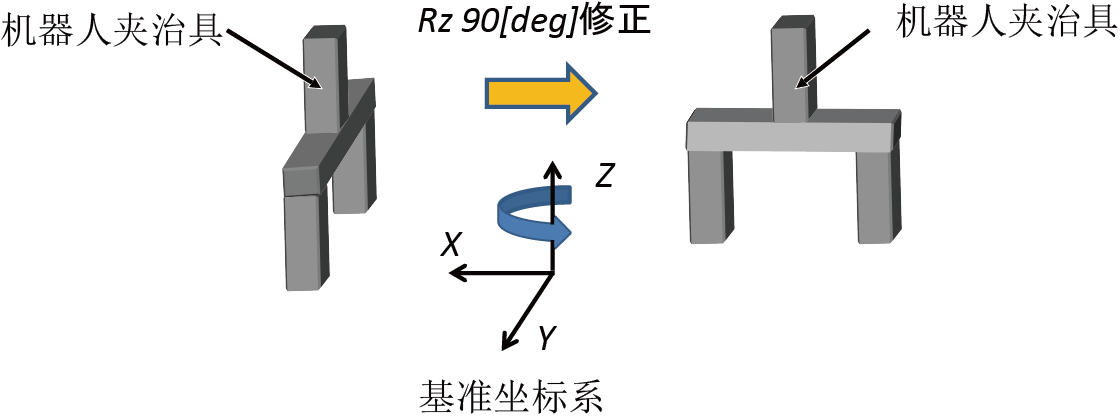
相关项目
Approach、 TrackBufferRead、 TrackDepart、 TrackMove、 TrackStart、 TrackStop、 TrackTargetOffset、 TrackTargetPos、 传送带跟踪用指令、 圆形跟踪用指令
注意事项
- 传送带及圆形跟踪专用指令。
- 仅可在TrackStart和TrackStop间使用。
- 与“Approach”动作不同,不移动至自变量指定的静止目标位置。
- 请注意,根据记述工具定义、工件定义变更的位置,机器人的动作目标位置不同。
1.在“TrackTargetPos”之前进行定义变更时
ChangeTool 1
ChangeWork 1
P[10] = TrackTargetPos(1,-1,1)
TrackApproach P, P[10], 100机器人的动作目标位置不受工具定义、工件定义变更的影响。
2.在“TrackTargetPos”之后进行定义变更时
P[10] = TrackTargetPos(1,-1,1)
ChangeTool 1
ChangeWork 1
TrackApproach P, P[10], 100机器人的动作目标位置受工具定义、工件定义变更的影响。
机器人的动作目标位置仅偏移变更后的工具定义、工件定义的量。
应用示例
-ID : 5346