
ID : 161
Approach
功能
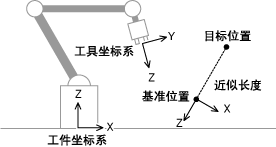
由基准位置移至偏离指定距离的趋近位置。
格式
Approach 动作插补, 基准位置, 趋近长度[, 动作选项]
指定项目
解说
向距离夹持位置等的基准位置指定趋近长度的位置移动。沿基准位置的工具坐标系-Z方向,距离基准位置 趋近长度的位置为目标位置。
执行该语句时,任务必须获取机器人轴的控制权。
使用Move命令改写
使用Move命令可将Approach命令改写为以下内容。
Approach P, P3, aaa↓
Move P, DevH(P3, P(0, 0, -aaa))相关项目
注意事项
目标位置的形态与基准位置的形态相同。
目标位置选项附加于趋近长度,而非基准位置。
例
Approach P, P[10], @P 40 Ex(7,10), Speed = 30应用示例
'!TITLE“<工具坐标系指定的绝对动作>”
' 从当前位置按指定值移动
Sub Sample_Approach
Dim aaa As Single
Dim bbb As Single
Dim ccc As Position
Dim ddd As Position
TakeArm Keep = 1
' 沿接近方向移动至距离P( 740, 0, 480, 180, 0, 180, -1 )坐标位置30mm的位置
Approach P, P( 740, 0, 480, 180, 0, 180, -1 ), 30
aaa = 15.0
bbb = 30.0
ccc = P( 600, 100, 300, 180, 0, 180, -1 )
ddd = P( 500, 300, 400, 180, 0, 180, -1 )
' 沿趋近方向移动至距离ccc坐标位置40mm的位置
Approach P, ccc, 40
' 以90%的速度,沿趋近方向移动至距离ddd坐标位置aaa(15mm)的位置
Approach L, ddd, aaa, Speed = 90
' 以50%的速度,沿趋近方向移动至距离ccc坐标位置bbb(30mm)的位置
Approach P, ccc, @P bbb, S = 50
End SubID : 161