
ID : 3135
TrackAbsMove S
格式
TrackAbsMove S [, 通过起始位移量],路径编号[, 动作选项]
指定项目
注意事项
- 传送带跟踪专用指令。
- 仅可在TrackStart和TrackStop间使用。
-
无指定路径编号的路径点时发生错误。
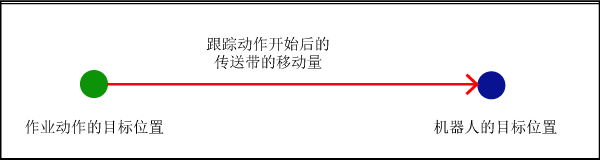
- 机器人实际到达的位置如下图所示,使作业动作的目标位置为只偏移从跟踪动作开始到作业动作结束之间的传送带位移量的位置。该偏移可以通过TrackStop进行复位。
应用示例
TakeArm Keep = 0
Do
Move P, P0 '向待机位置移动
Wait IO[10] = On '等待执行作业的工件通过动作开始位置
TrackStart 1, 1 '跟踪模式开始
TrackAbsApproach P, P10, 30 '执行向P10 上空进行作业动作的跟踪动作
TrackAbsMove L, P10 '执行向P10执行作业动作的跟踪动作
TrackAbsMove S, 10’执行进行路径编号10的自由曲线动作的跟踪动作
TrackDepart L, 30 '执行向上空进行作业动作的跟踪动作
TrackStop '跟踪模式结束
Loop Until IO[128] = On
ID : 3135