
ID : 2221
术语及其定义
- 跟踪模式
- 是指传送带跟踪功能处于有效的状态。
处于该状态时,通过调用专用动作指令(“TrackApproach”、“TrackDepart”、“TrackMove”、“TrackDraw”),可使机器人相对于随传送带的移动而动态变化的目标位置进行动作。 - 在跟踪模式中不能进行排他控制、SS2、通过RSM减速等。
如果执行,将因错误停止。
排他控制与传送带跟踪的同时使用在Ver.2.8.*以后能够进行。
- 非跟踪模式(常规动作模式)
- 是指传送带跟踪功能处于无效的状态。控制器启动时的初始状态。
使用动作指令(“Approach”、“Depart”、“Move”等),使机器人相对于静止的目标位置进行动作。
在此状态下,如果调出专用动作指令(“TrackApproach”、“TrackDepart”、“TrackMove”、“TrackDraw”),则发生错误。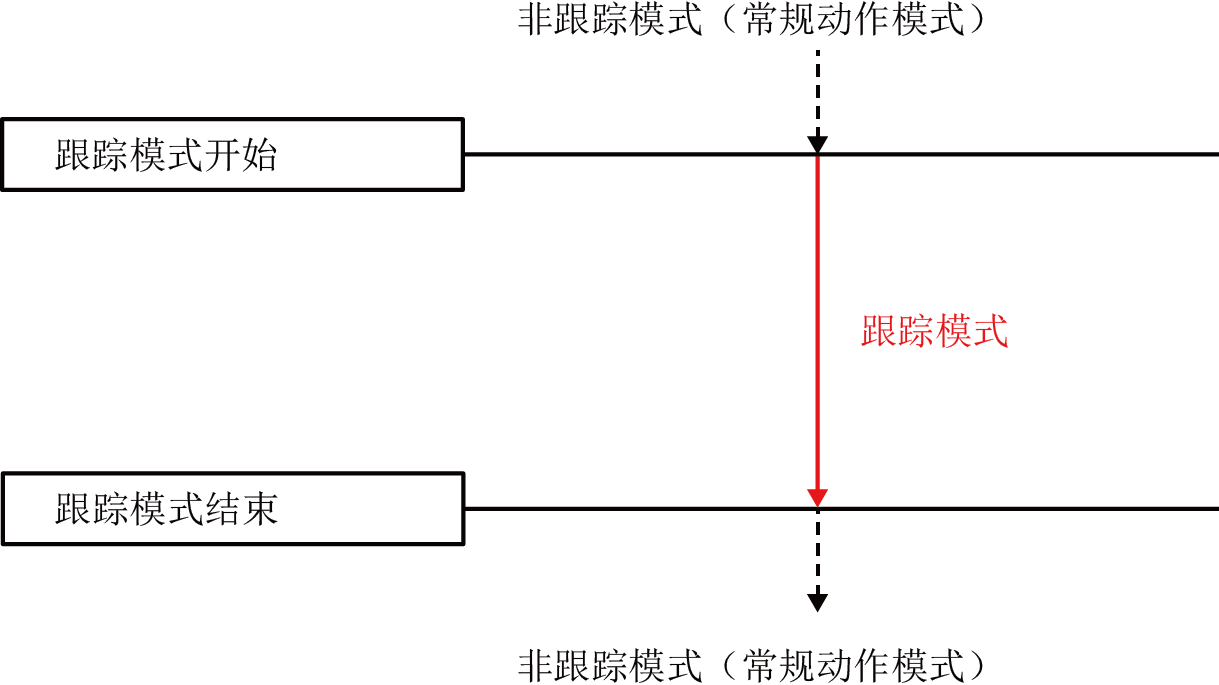
- 传送带追踪动作(追踪动作)
- 指示机器人追上传送带上工件的动作。
机器人在与传送带上的工件等速前加速,追上工件后与传送带并行移动。
- 作业动作
- 指示与追踪传送带的动作(追踪动作)同时进行的机器人作业动作。
例如,“TrackApproach”动作是传送带追踪动作与作业动作“Approach”的合成动作。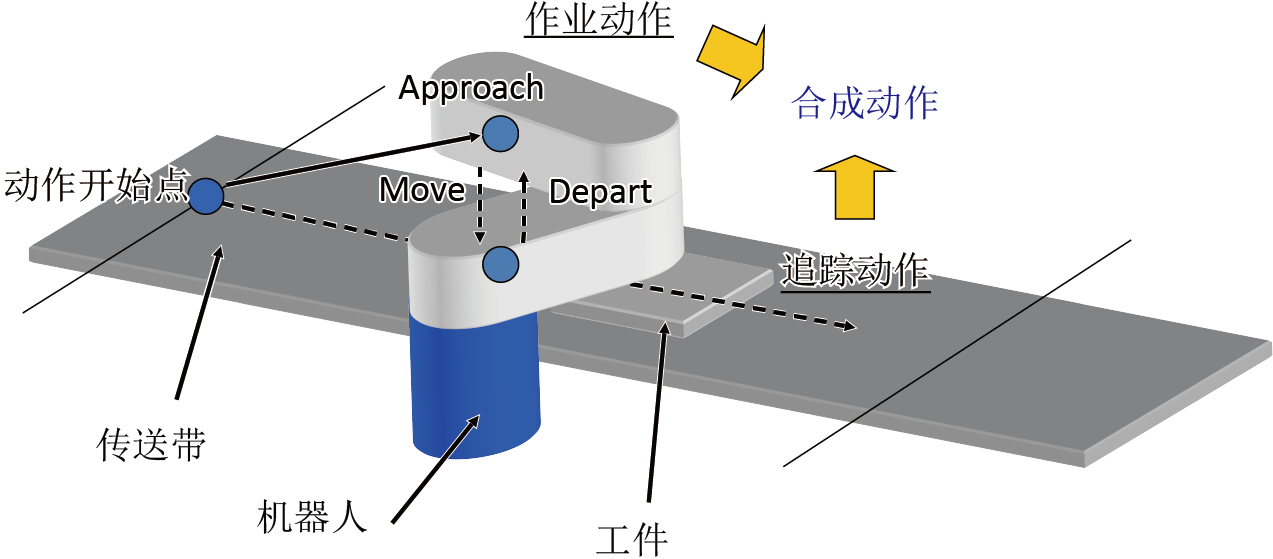
- 传送带跟踪缓冲区(跟踪缓冲区)
- 在传感器和视觉传感器检测到工件时,用于事先保存工件相关数据的记忆领域。
1个工件注册保存的数据如下所示。
| 保存值 | |
|---|---|
| (1) | 跟踪缓冲区内的索引值(整数型数据) |
| (2) | 工件检测时的传送带编码器值(整数型数据) |
| (3) | 视觉传感器检测坐标(变体(Variant)型数据排列) |
| 传感器检测位置(位置型数据) | |
| (4) | 用户数据(整数型数据) |
| (5) | 属性数据(整数型数据) |
- 传送带矢量
- 表示传送带行进方向的长度1的三维矢量。从基础坐标系观察的方向矢量。
- 跟踪对象工件
- 指示从跟踪缓冲区中调取的,想要用于当前跟踪动作的工件数据。
变为“TrackInRange”和“TrackArrivalTime”等指令的处理对象。
- 跟踪范围
- 机器人可执行传送带追踪动作的传送带上的范围。
受工件传来侧(上流)的上游上限和传走侧(下流)的下游下限的限制。
使用多台机器人时,设定各机器人的跟踪范围。
- 跟踪范围上游上限(上游上限)
- 这是机器人可开始传送带追踪动作的上流侧位置。
必须为机械人手臂可到达的位置。
- 跟踪范围下游下限(下游下限)
- 机器人停止传送带追踪动作并开始减速的下流侧位置。
必须为机械人手臂可到达的位置。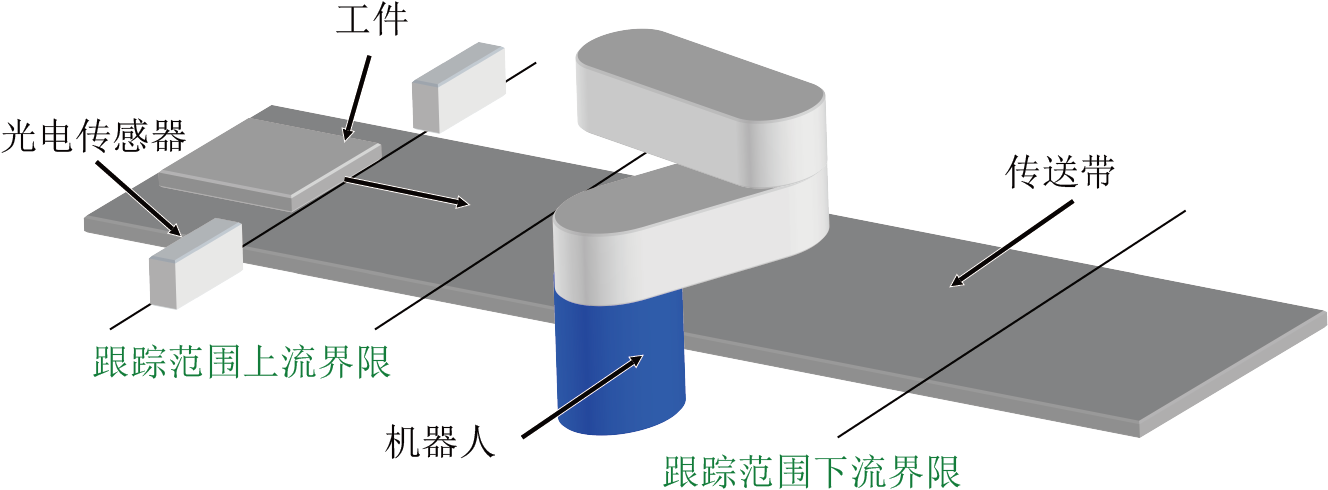
- 跟踪范围上游上限位置(上游上限位置)
- 指定跟踪范围上游上限时,在传送带校准中注册的位置。
从基础坐标系观察的机器人法兰中心的位置。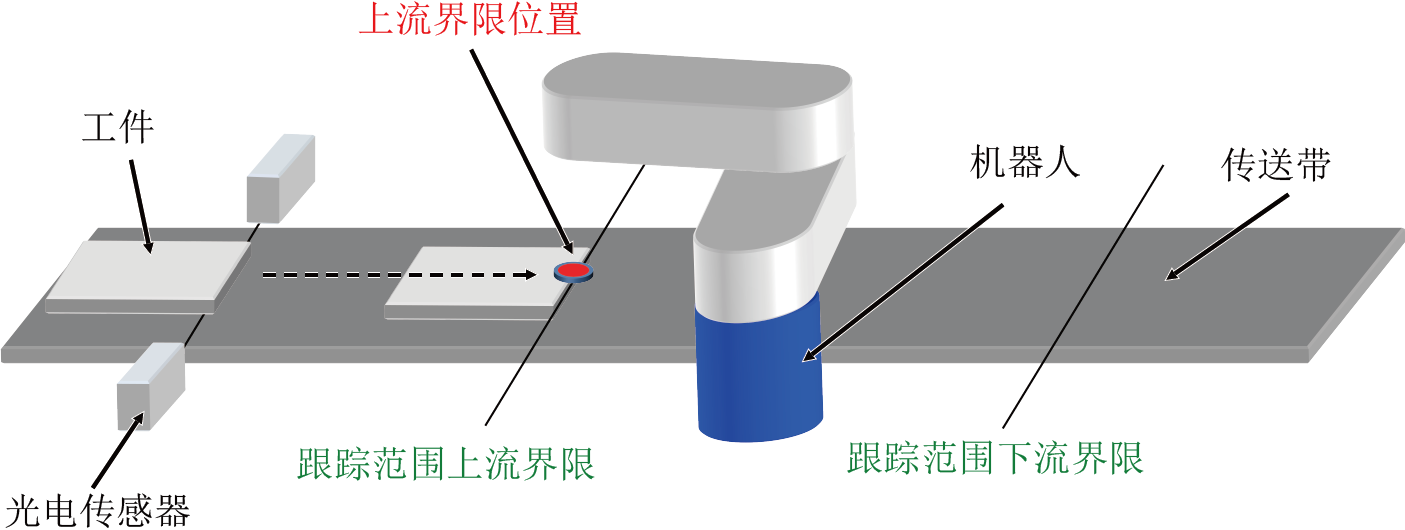
- 跟踪范围下游下限位置(下游下限位置)
- 指定跟踪范围下游下限时,在传送带校准中注册的位置。
从基础坐标系观察的机器人法兰中心的位置。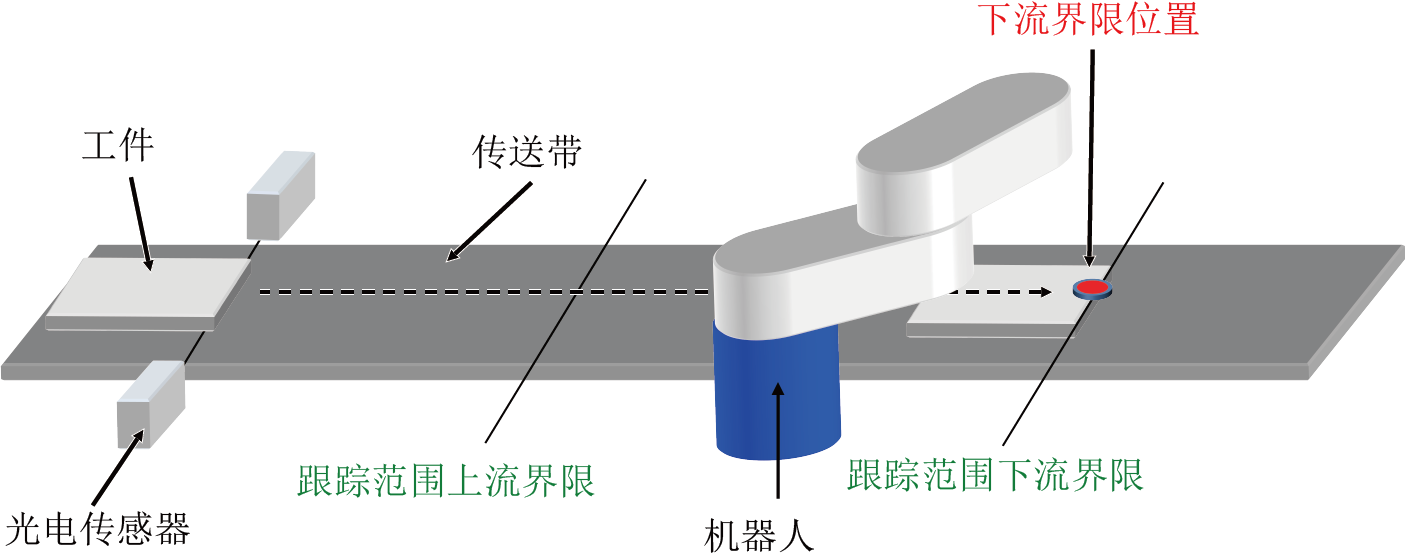
- 传送带基准位置
- 是指跟踪范围上游上限位置和跟踪范围下游下限位置的中点位置(X, Y, Z)。
跟踪范围上游上限和跟踪范围下游下限发生变更后,该位置也将随之更新。
从基础坐标系观察的机器人法兰中心的位置。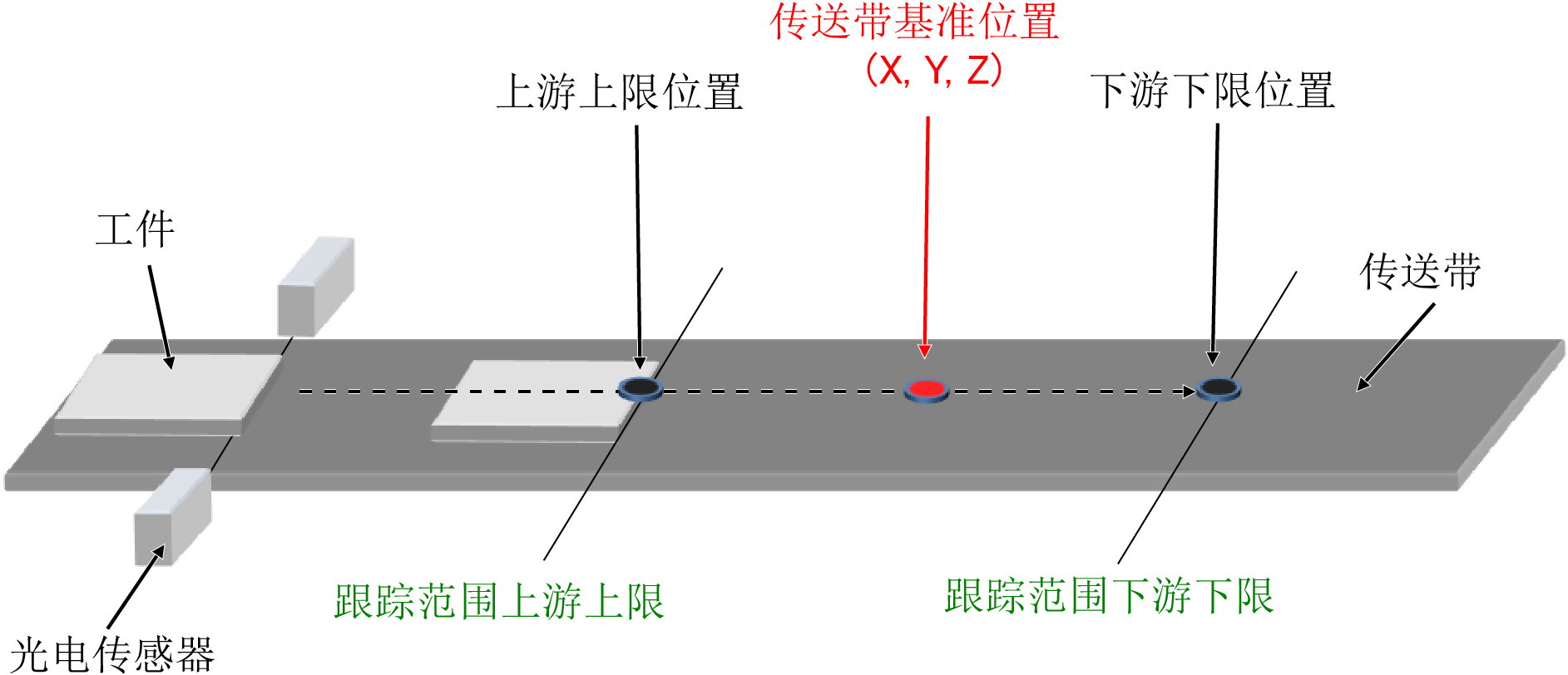
- 工件夹持基本姿势
- 是指传送带跟踪动作时前去夹持工件的位置型的姿势(Rx, Ry, Rz)。
在示教跟踪范围上游上限位置时被登录。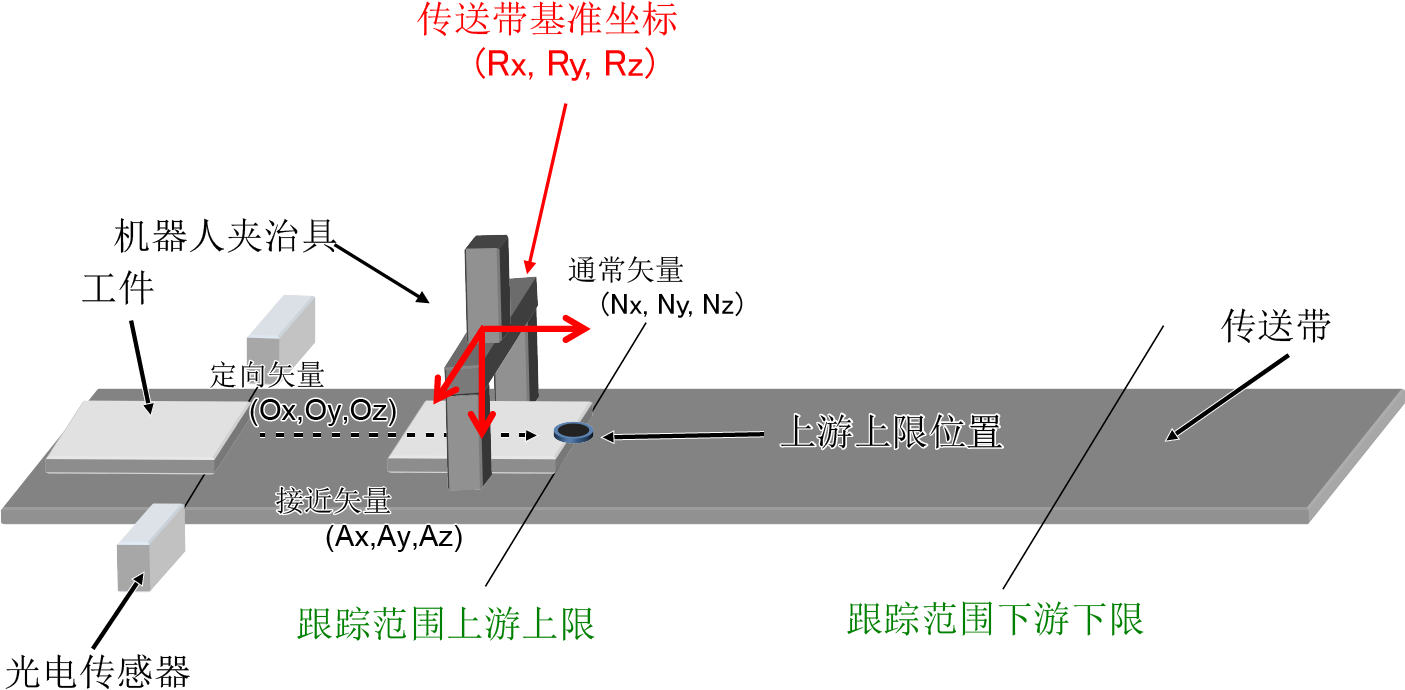
- 传送带校准
- 在RC8系列的传送带跟踪上,对于传送带和机器人,是指计测各自的正确的位置关系。具体是指计测下述参数。
| 参数名称 | 内容 |
|---|---|
| 传送带CALDATA值(X,Y) | 表示传送带前进方向的基础坐标Z轴旋转的旋转角度[rad] |
| 传送带CALDATA值Z | 从表示传送带前进方向的基础坐标XY平面看到的倾斜[rad] |
| 传送带进给量 | 编码器每旋转1周的传送带前进量[mm/rev] |
| 编码器旋转方向 | 传送带从上游传送到下游时的编码器的旋转方向(1:正转、-1:反转) |
| 参数名称 | 内容 |
|---|---|
| 跟踪范围上游上限 | 这是机器人可开始传送带追踪动作的上流侧位置[mm]。 |
| 跟踪范围下游下限 | 机器人停止传送带追踪动作并开始减速的下流侧位置[mm] |
| 参数名称 | 内容 |
|---|---|
| 传送带基准坐标X | 上游上限位置和下游下限位置的中点位置X[mm] |
| 传送带基准坐标Y | 上游上限位置和下游下限位置的中点位置Y[mm] |
| 传送带基准坐标Z | 上游上限位置和下游下限位置的中点位置Z[mm] |
- 传感器校准
- 在RC8系列的传送带跟踪上,对于传感器和机器人,是指计测各自的正确的位置关系。具体是指计测下述参数。
-
Ver.1.11.*以前的版本与Ver.1.12.*以后的版本在进行校准时保持的格式不同。 另外,Ver.1.11.*以前的版本在传感器跟踪与视觉跟踪上保持的格式不同。 用Ver.1.12.*以后的版本进行校准的结果不能在Ver.1.11.*以前的版本的控制器上使用。
| 参数名称 | 内容(Ver.1.11.*以前的版本) | 内容(Ver.1.12.*以后) |
|---|---|---|
| CALDATA值(00) | 传感器检测位置X[mm] | 齐次变换型工件夹持基本姿势的Nx |
| CALDATA值(01) | 传感器检测位置Y[mm] | 齐次变换型工件夹持基本姿势的Ox |
| CALDATA值(02) | 传感器检测位置Z[mm] | 齐次变换型工件夹持基本姿势的Ax |
| CALDATA值(03) | 齐次变换型工件夹持基本姿势的Ox | 传感器检测位置X[mm] |
| CALDATA值(10) | 齐次变换型工件夹持基本姿势的Oy | 齐次变换型工件夹持基本姿势的Ny |
| CALDATA值(11) | 齐次变换型工件夹持基本姿势的Oz | 齐次变换型工件夹持基本姿势的Oy |
| CALDATA值(12) | 齐次变换型工件夹持基本姿势的Ax | 齐次变换型工件夹持基本姿势的Ay |
| CALDATA值(13) | 齐次变换型工件夹持基本姿势的Ay | 传感器检测位置Y分量[mm] |
| CALDATA值(20) | 齐次变换型工件夹持基本姿势的Az | 齐次变换型工件夹持基本姿势的Nz |
| CALDATA值(21) | 0 | 齐次变换型工件夹持基本姿势的Oz |
| CALDATA值(22) | 0 | 齐次变换型工件夹持基本姿势的Az |
| CALDATA值(23) | 0 | 传感器检测位置Z[mm] |
| 参数名称 | 内容 |
|---|---|
| 传送带基准坐标RX | 工件夹持基本姿势的RX[deg] |
| 传送带基准坐标RY | 工件夹持基本姿势的RY[deg] |
| 传送带基准坐标RZ | 工件夹持基本姿势的RZ[deg] |
- 照相机参数
- 在RC8系列的传送带跟踪上,是指将视觉传感器的图像坐标改为从机器人的基础坐标看到的位置的参数。具体是指下述参数。
-
Ver.1.11.*以前的版本与Ver.1.12.*以后的版本在进行校准时保持的格式不同。
另外,Ver.1.11.*以前的版本在传感器跟踪与视觉跟踪上保持的格式不同。
用Ver.1.12.*以后的版本进行校准的结果不能在Ver.1.11.*以前的版本的控制器上使用。
| 参数名称 | 内容(Ver.1.11.*以前的版本) | 内容(Ver.1.12.*以后) |
|---|---|---|
| CALDATA值(00) | 视觉传感器检测位置X[mm] | 齐次变换型的Nx |
| CALDATA值(01) | 视觉传感器检测位置Y[mm] | 齐次变换型的Ox |
| CALDATA值(02) | 视觉传感器检测位置Z[mm] | 齐次变换型的Ax |
| CALDATA值(03) | 齐次变换型的Ox | 视觉传感器检测位置X[mm] |
| CALDATA值(10) | 齐次变换型的Oy | 齐次变换型的Ny |
| CALDATA值(11) | 齐次变换型的Oz | 齐次变换型的Oy |
| CALDATA值(12) | 齐次变换型的Ax | 齐次变换型的Ay |
| CALDATA值(13) | 齐次变换型的Ay | 视觉传感器检测位置Y[mm] |
| CALDATA值(20) | 齐次变换型的Az | 齐次变换型的Nz |
| CALDATA值(21) | 0 | 齐次变换型的Oz |
| CALDATA值(22) | 0 | 齐次变换型的Az |
| CALDATA值(23) | 0 | 视觉传感器检测位置Z[mm] |
- 校准照相机
- 在RC8系列的传送带跟踪上,对于视觉传感器和机器人,是指计测各自的正确的位置关系。具体是指计测照相机参数和下述参数。
| 参数名称 | 内容 |
|---|---|
| 传送带基准坐标RX | 工件夹持基本姿势的RX[deg] |
| 传送带基准坐标RY | 工件夹持基本姿势的RY[deg] |
| 传送带基准坐标RZ | 工件夹持基本姿势的RZ[deg] |
- 传感器检测位置
- 指利用光线传感器检测到的瞬间,从机器人坐标系观察工件处于哪个地方的位置(X, Y, Z)。将在传感器校准中示教的跟踪范围上游上限位置返回到反传送带矢量方向的位置。
从基础坐标系观察的机器人法兰中心的位置。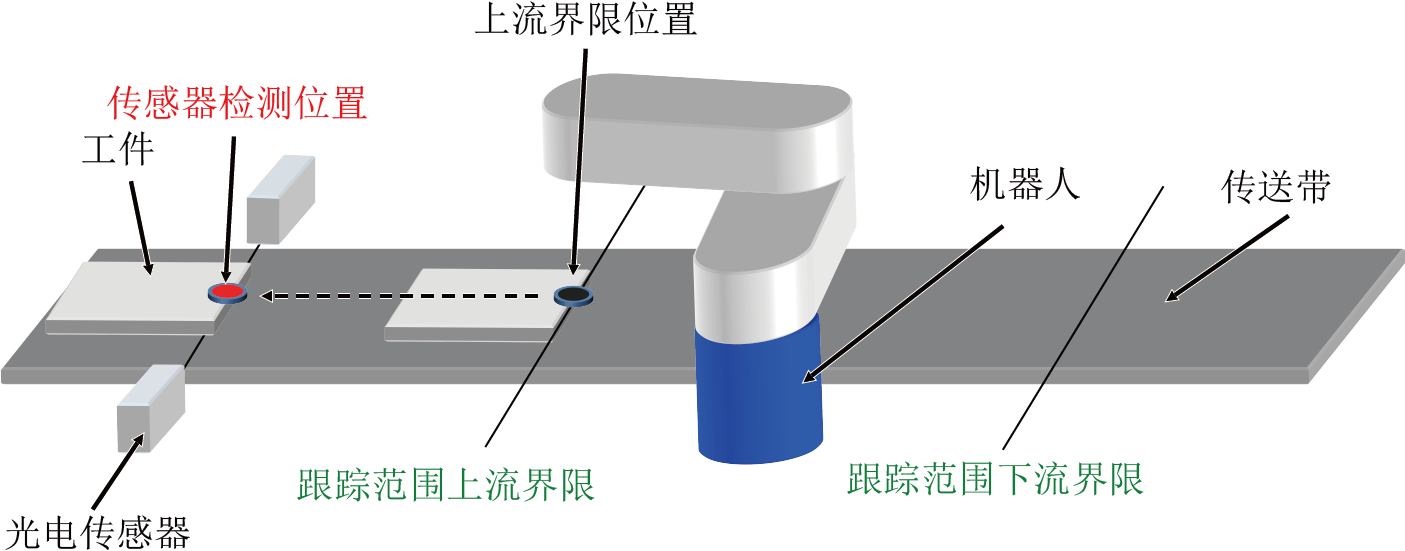
- 零点坐标
- 图像坐标上的基准点。可用于定义视觉传感器检测位置。在Ver.2.0.*以及更早的版本中常常指图像坐标(0, 0)。Ver.2.0.*以及更高版本中,设定在进行校准照相机时,示教的3个基准点内的第1点图像坐标。
- 视觉传感器检测位置
- 指利用视觉传感器检测到的瞬间,从机器人坐标系观察零点坐标工件处于哪个地方的位置(X, Y, Z)。从基础坐标系观察的机器人法兰中心的位置。
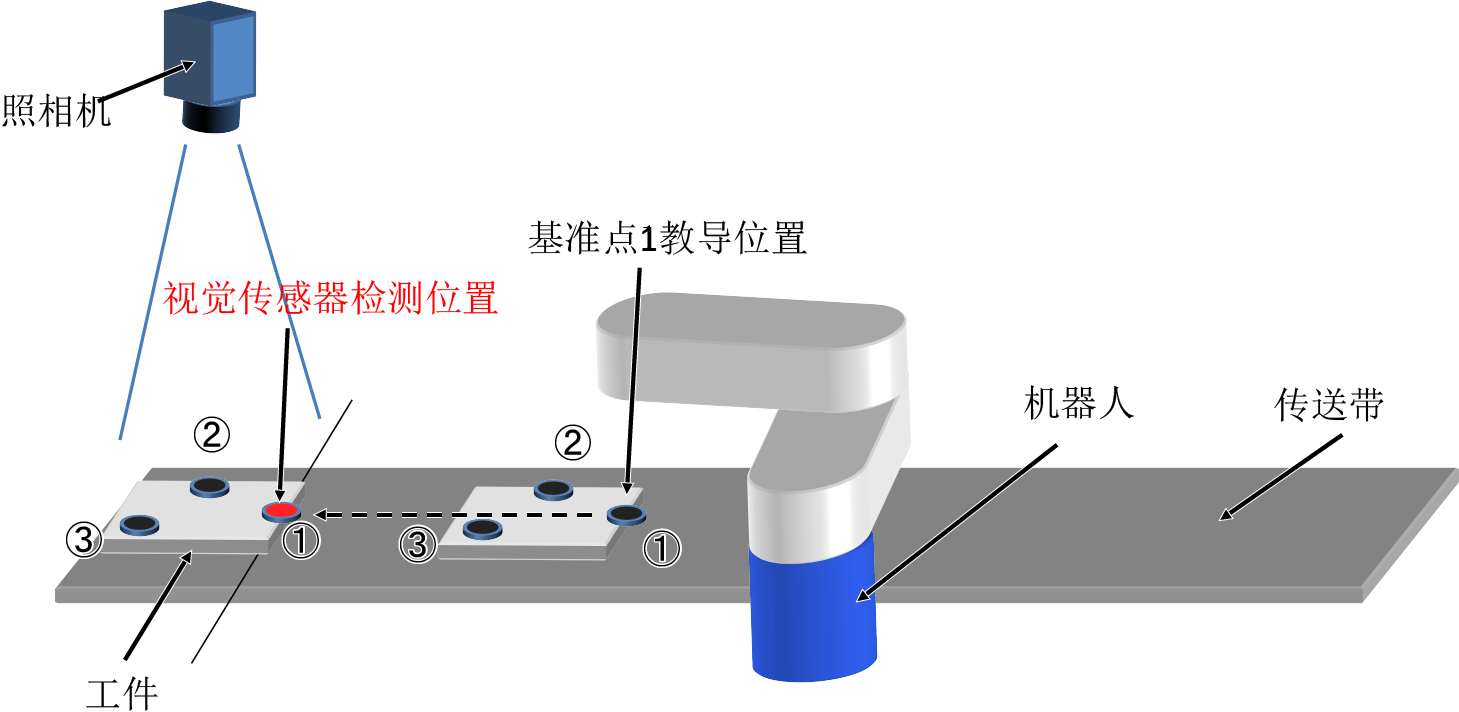
- 视觉传感器检测坐标
- 通过视觉传感器检测到工件时的图像坐标(x, y)[pixel]和工件姿势角度θ[deg]。
通过按照(x、y、θ)顺序保存的3要素变体(Variant)型数据排列进行表示。通过单精度实数型数据表示各要素。
- 跟踪开始范围
- 这是将跟踪范围上游上限向上游侧偏移一定量后的位置。
在跟踪缓冲区中,此位置下流的工件数据变为跟踪对象工件的候补。
为使机器人从待机位置向跟踪范围上游上限移动期间,被传送至跟踪范围的工件也可设定为跟踪对象,设置此范围。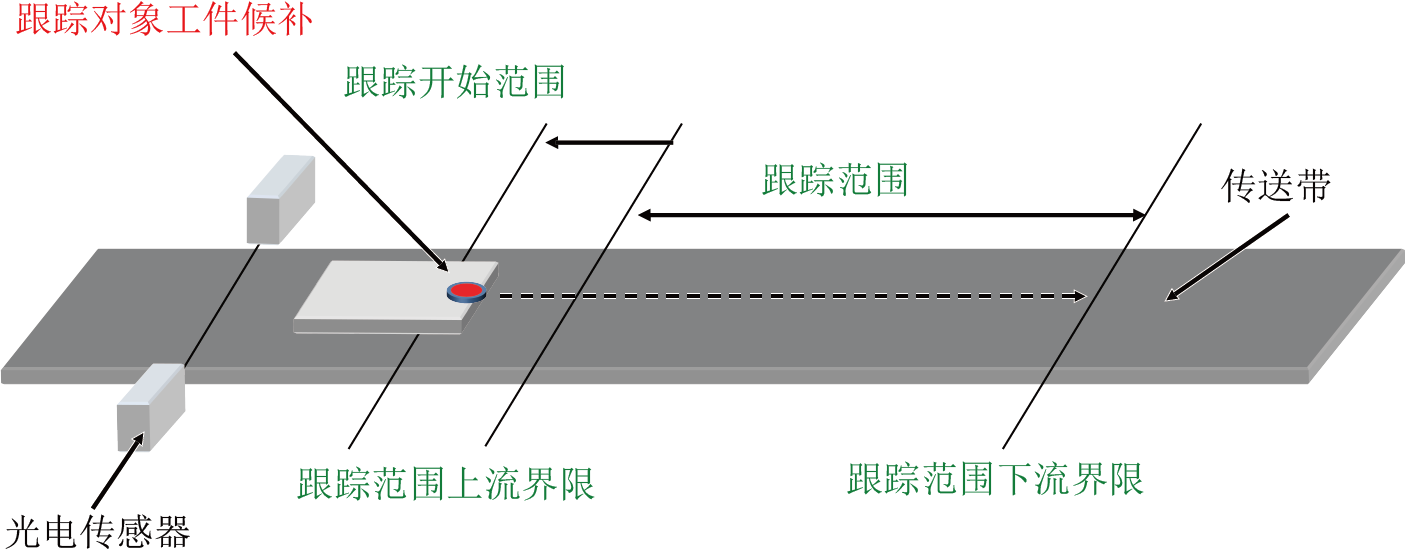
ID : 2221