
ID : 3134
TrackAbsMove
格式
TrackAbsMove 动作插补,目标位置[, 动作选项]
指定项目
解说
一边执行跟踪动作,一边执行向指定目标位置移动的作业动作。执行该指令时,任务必须获取机器人轴的控制权。
在传送带跟踪中,追随动作以及作业动作时的机器人的臂前端的姿势保持通过第2自变量的目标位置指定的姿势。
如果是圆形跟踪,从该指令的执行开始时到现在转台的旋转角度有多大,臂前端的姿势就旋转多大。旋转前的姿势就是通过第2自变量的目标位置指定的位置的姿势。
即使是圆形跟踪,也能使机器人的姿势保持通过第2自变量的目标位置指定的位置的姿势。
此时,通过TrackStart指令,可切换臂前端的姿势控制方法。详细内容请参照TrackStart指令的指定项目“选项设定”。
有关臂前端的指示,请参照“臂前端的姿势控制种类”。
注意事项
- 传送带及圆形跟踪专用指令。
- 仅可在TrackStart和TrackStop间使用。
-
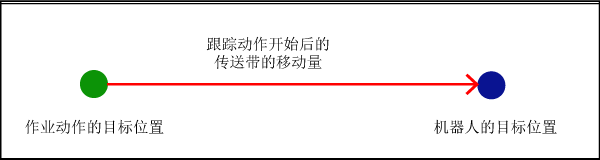
机器人实际到达的位置如下图所示,使作业动作的目标位置为只偏移从跟踪动作开始到作业动作结束之间的传送带位移量的位置。该偏移可以通过TrackStop进行复位。
应用示例
TakeArm Keep = 0
Do
Move P, P0 '向待机位置移动
Wait IO[10] = On '等待执行作业的工件通过动作开始位置
TrackStart 1, 1 '跟踪模式開始
TrackAbsApproach P, P10, 30 '执行向P10 上空进行作业动作的跟踪动作
TrackAbsMove L, P10 '执行向P10执行作业动作的跟踪动作
TrackAbsMove L, P11 '执行向P11执行作业动作的跟踪动作
TrackAbsMove L, P12 '执行向P12执行作业动作的跟踪动作
TrackDepart L, 30 '执行向上空进行作业动作的跟踪动作
TrackStop '跟踪模式结束
Loop Until IO[128] = On
ID : 3134