
ID : 519
通过起始位移量
“通过起始位移量”指动作语句向目标位置动作期间,指定下一行命令开始的时机。
作为动作语句的目标位置选项,以“@[通过起始位移量]”的格式指定整数型数据。使用mm单位来指定到达目标位置的大致距离。
例
Move L, @[50] PosA
Move L, PosB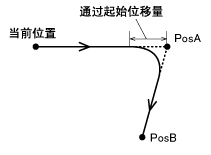
上述的指令值与目标位置PosA的距离小于50mm时,执行下一行向PosB移动的命令。
使用通过起始位移量指定下一行的执行时机为从动作开始减速到停止(确认编码值已到达目标位置)。
通过起始位移量指定的种类
| 指定值 | 动作名称 | 内容 |
|---|---|---|
| >0 | 位置指定的通过动作 | 当指令值和目标位置之间的距离接近指定数值时执行下一行指令。
|
| =0 | 结束动作 | 指令值到达目标位置后执行下一行指令。
|
| =-1或@P | 通过动作 | 开始减速时执行下一行指令。也可记述为“@P”。
|
| =-2或@E | 编码值确认动作 (各轴位置) |
确认各轴的当前位置(编码值)已到达目标位置时执行下一行指令。也可记述为“@E”。
|
| =-6或@C | 编码值确认动作 (臂前端位置、姿势) |
根据编码值,确认变换坐标后的臂前端位置和姿势到达目标时执行下一行指令。也可记述为“@C”。
使用CrtMotionAllow指令,可变更用于判定的位置精度与姿势精度。 |
位置指定的通过动作有时会产生误差,请将指定数值作为标准。
根据当前位置(编码值)执行位置指定的通过动作
在位置指定的通过动作中,如果不指定“@[通过起始位移量]”而指定“@a[通过起始位移量]”,则当前位置(编码值)和目标位置之间的距离接近指定数值时执行下一行指令。
另外,通过整数型数据指定通过起始位移量。
Move L, @a[50] P[10]位置指定的通过动作有时会产生误差,请将指定数值作为标准。
变更编码器值确认动作的判断模式
执行振动动作时,通过编码器值确认动作(@E、@C)到达目标位置并作出判断后,会出现因振动而从目标位置开始动作的情况。此时,通过变更使用条件一览中编码器确认动作的判断模式,等待振动结束后可执行下一行的动作。
但是,变更编码器值确认动作的判断模式时,仅确认振动结束的部分并延长执行时间。
关于使用条件一览的详情,请参照功能指南的“使用条件一览表”。
与下述编号项目相关。
- No.171:臂前端编码器值确认动作停止判断模式
- No.172-179:各轴编码器值确认动作停止判断模式
- No.180:臂前端编码器值确认动作停止判断时间
- No.181-188:各轴编码器值确认动作停止判断时间
ID : 519