
ID : 2848
设置步骤
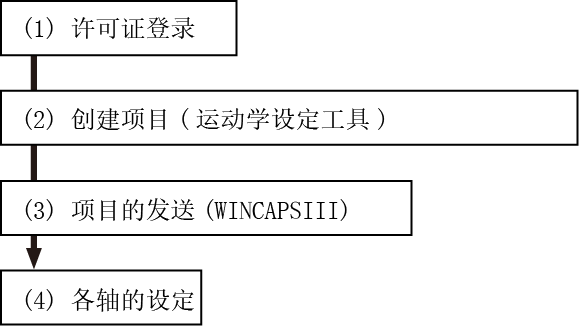
在进行“(2)创建项目”前,也可进行“(4)各轴的设定”。
此时,进行“各轴的设定”后,请用运动学设定工具选择[编辑原有项目]。
(1)许可证登录
由于该功能是选项功能,需要将许可证登录到各控制器。
使用多功能教导器进行。
关于输入操作,请参照选项的“许可证登录”。
机器人类型X、XY、XYZ、XYZT的运动学作为MC8系列的标准功能配备。为此,在没有许可证的状态也能利用。
在无许可证的状态,根据在“机器人轴范围的设定”中选择的轴数,自动设定X、XY、XYZ、XYZT的运动学。(例如,作为机器人轴范围选择了4轴时,内部设定XYZT的运动学。)
(2)创建项目(运动学设定工具)
用运动学设定工具创建项目。
(3)项目的发送(WINCAPSIII)
通过WINCAPSIII向控制器发送项目。
(4)各轴的设定
为了使机器人动作,按照各轴设定。
请全部执行附加轴使用说明书的“附加轴起动步骤(滚珠丝杠)”的步骤。
使用并联连杆机器人时,除了上述步骤外,还有需要参数设定的项目。详细内容请参照“并联连杆机器人的添加设定参数”。
另外,关于臂参数的设定,请参照MC8系列(动作控制器)使用说明书的“臂参数的设定”。
设定控制系统的增益参数时,不满足自动增益调整的实施条件时,请实施手动增益调整。
详细内容请参照附加轴使用说明书中的“自动增益调整实施方法”、“手动增益调整实施方法”。
ID : 2848
- 本页相关信息
- 创建项目
- 发送项目
- 并联连杆机器人的添加设定参数