
ID : 5092
自动增益调整实施方法
所谓自动增益调整,是指按照在控制器内部预先规定的模式进行加减速动作,根据当时的动作推测负载惯量,据此自动设定合适的增益。
请用满足下述条件的附加轴实施自动增益调整。不满足下述条件时,在自动调整中有时会发生错误,自动增益调整中断。
进行自动增益调整时,由于以高于一般手动动作的速度动作,请勿靠近对象轴外围及其运行范围。
- 当自动PosClr功能有效时,请设为无效。
- 安全动作规格中,请将监视功能暂时设成无效。实施方法请参照“RC8A安全动作规格使用说明书”中“对现有功能的影响”的“关于自动增益调整”。
实施自动增益调整时的条件
- 负载惯量在电机规格内不大幅波动。
- 也包括电机、联轴器在内,附加轴的刚性大。
- 齿轮等的齿隙小。
- 电机进行CCW方向(反时针方向)旋转2周、CW方向(顺时针方向)旋转2周的正反转也不出问题。
自动增益调整的操作步骤
该操作通过“维护”实施。
1
接通电机电源。
若是自动模式、教导检查模式,请切换为手动模式。
2
朝即使进行CCW(反时针方向)旋转2周、CW(顺时针方向)旋转2周的正反转,也不出问题的位置移动。
3
按基本画面-[F2 机械臂]-[F12 保养]-[F10 轴设定],显示[轴设定]画面。
4
按[F7 自动增益调整]。

显示“自动增益调整”画面。
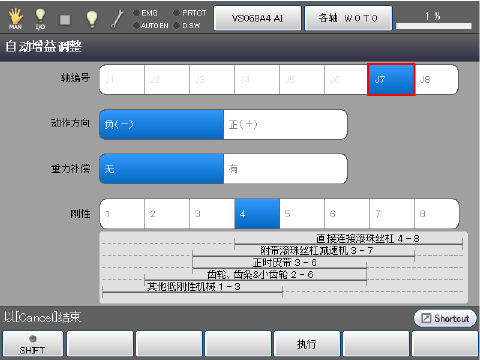
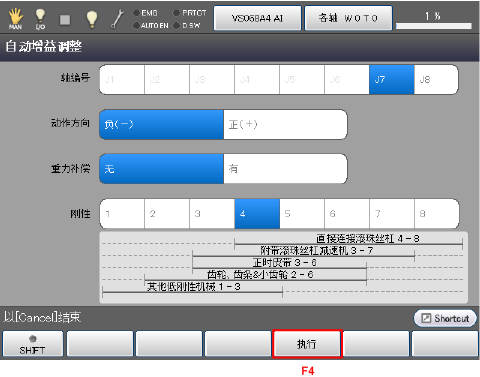
5
选择执行自动增益调整的轴编号。
以下的例子表示选择了“7轴”时的情形。
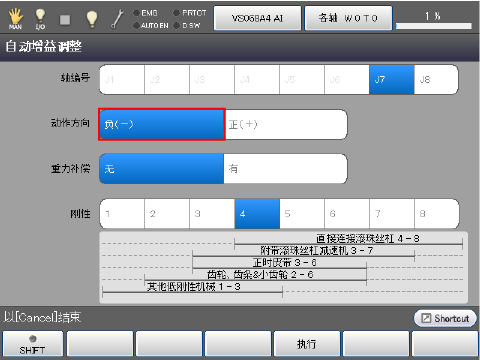
6
选择动作方向。
以下的例子表示选择了“负(-)方向”时的情形。
7
选择重力补偿的有/无。
以下的例子表示选择了[无重力补偿]时的情形。
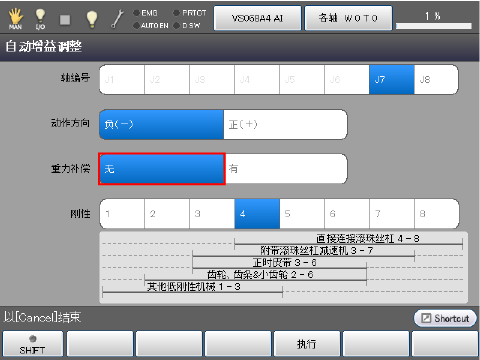
当电机承受不均衡负载时,请选择[有重力补偿]。
如果选择自动增益调整时的[有重力补偿],自动计算伺服设定参数的扭矩偏移值。在“轴设定”画面上按[F5 伺服设定],显示“伺服参数”画面,如果按[OK],计算得出的扭矩偏移值被保存。
8
选择刚性。
请参考以下的基准选择刚性。
以下的例子表示选择了[4]时的情形。
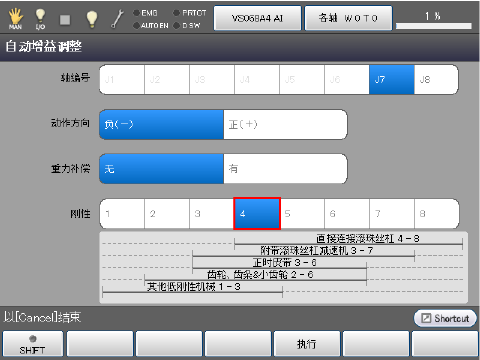
| 驱动方式 | 刚性值 |
|---|---|
| 滚珠丝杠直连 | 4~8 |
| 带滚珠丝杠减速机 | 3~7 |
| 同步皮带 | 3~6 |
| 齿轮、齿条与小齿轮 | 2~6 |
| 其他低刚性的机械 | 1~3 |
9
按[F4 执行]。
显示以下的系统消息。
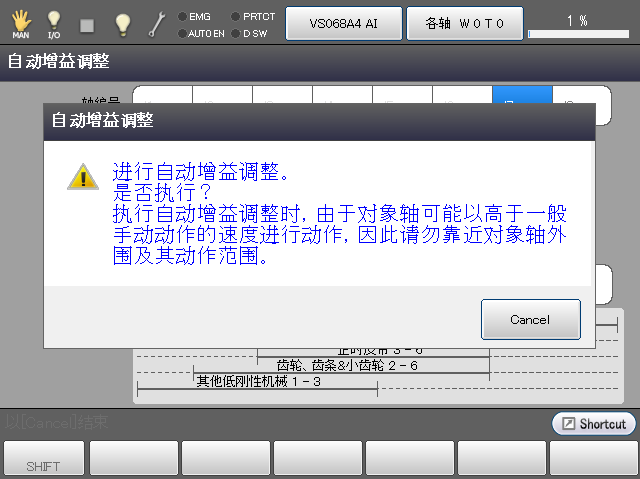
在按下双重安全开关的状态,如果按多功能教导器的[OK],开始自动增益调整动作。
请在按下双重安全开关和[OK]按钮的状态执行自动增益调整动作。如果在自动增益调整动作中松开双重安全开关或[OK]按钮,自动增益调整动作中断。
- 如果在自动增益调整动作中按教导器的键,自动增益调整动作被中断。请注意,在自动增益调整动作中不要按其他键。
- 在“伺服参数设定”画面上,将设定轴的有效/无效设为[仅编码器有效]时,在自动增益调整执行时发生“不能执行”的错误。
10
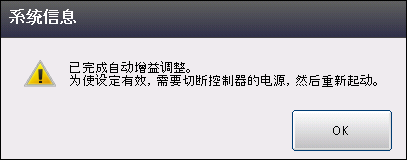
重复电机CCW/CW方向2周的往复动作2次,计算初期增益后,最多执行8个往复的微调动作。要是在8个往复内确定增益,自动增益调整完成。
自动增益调整完成后,显示以下讯息。重启控制器。
- 如果对无限旋转轴执行自动增益调整,CALSET值丢失。请再次执行CALSET。
-
在8个往复的微调动作后,有时会发生以下的警告。
- “自动增益调整的调整结果未能收敛。”
- 警告发生后,如果动作无问题,请继续完成增益调整。有异响、振动等,动作有问题时,请变更机械刚性,再次实施自动增益调整。
-
如果刚性低的机械选择了高刚性,而刚性高的机械选择了低刚性,在自动增益调整中有时会发生错误。此时,请变更刚性,再次实施自动增益调整。
ID : 5092