
ID : 2973
并联连杆机器人的添加设定参数
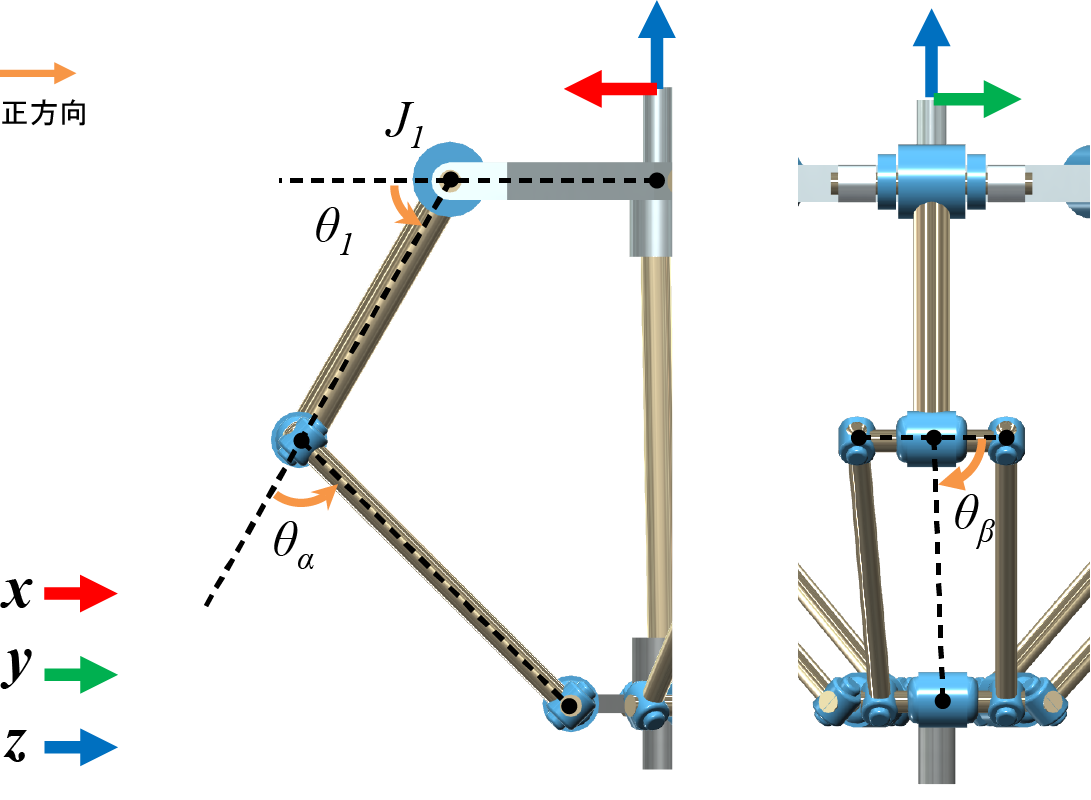
选择并联连杆机器人作为机器人型号时,除了电机轴角度(θ1)的动作范围限制外,为了防止肘部破损,还需要设定图中所示的θα、θβ的动作范围。
操作步骤
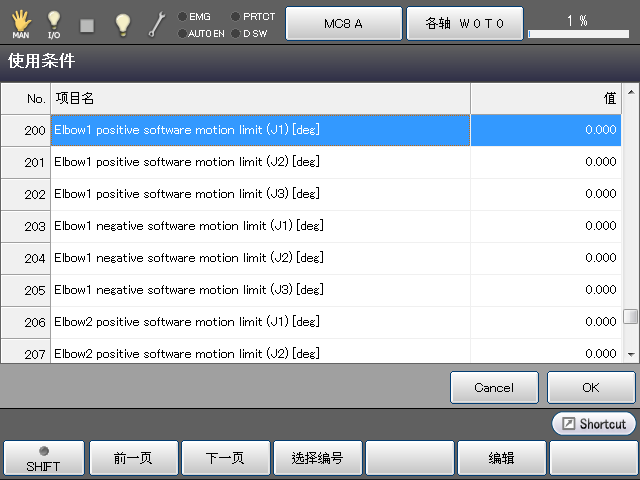
按照以下步骤打开使用条件画面,设定参数。
操作路径:[机械臂画面]-[辅助功能]-[F1 使用条件]
θα 的动作范围
θα的动作范围通过以下的参数进行设定。
| 编号 | 项目名 |
|---|---|
| 200 | 肘1正方向软件限位(J1)[deg] |
| 201 | 肘1正方向软件限位(J2)[deg] |
| 202 | 肘1正方向软件限位(J3)[deg] |
| 203 | 肘1负方向软件限位(J1)[deg] |
| 204 | 肘1负方向软件限位(J2)[deg] |
| 205 | 肘1负方向软件限位(J3)[deg] |
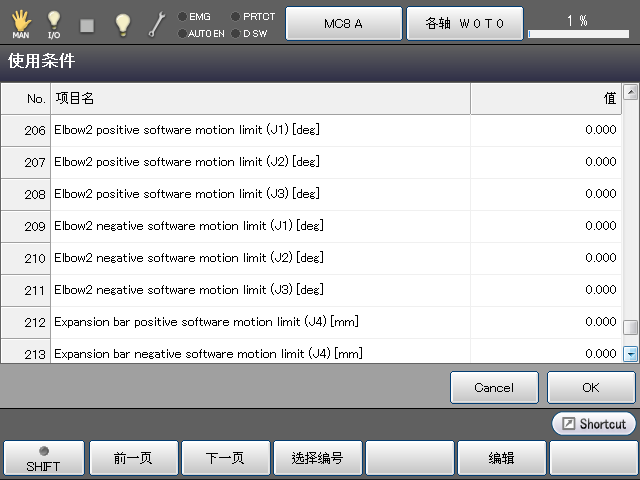
θβ的动作范围
θβ的动作范围通过以下的参数进行设定。
| 编号 | 项目名 |
|---|---|
| 206 | 肘2正方向软件限位(J1)[deg] |
| 207 | 肘2正方向软件限位(J2)[deg] |
| 208 | 肘2正方向软件限位(J3)[deg] |
| 209 | 肘2负方向软件限位(J1)[deg] |
| 210 | 肘2负方向软件限位(J2)[deg] |
| 211 | 肘2负方向软件限位(J3)[deg] |
使用4轴并联连杆机器人时
选择了4轴并联连杆机器人时,向4轴传递动力的部分是伸缩机构,因此需要设定图中所示的伸缩长Lex的最大值和最小值。
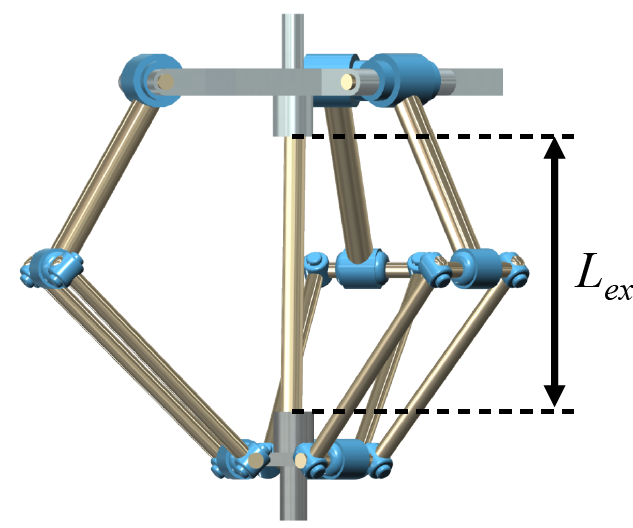
Lex通过以下的参数进行设定。
| 编号 | 项目名 |
|---|---|
| 212 | 伸缩杆p正方向软件限位(J4)[mm] |
| 213 | 伸缩杆负方向软件限位(J4)[mm] |
ID : 2973