
ID : 4927
手动增益调整处理方法
可以通过手动增益调整调整的参数如下所示。
- 位置比例增益
- 位置前馈增益
- 位置偏差允许范围
- 速度比例增益
- 速度积分增益
- 扭矩指令低通滤波器2时间常数2
- 扭矩偏移设定
关于伺服系统的简单构成图表,请参照下图。
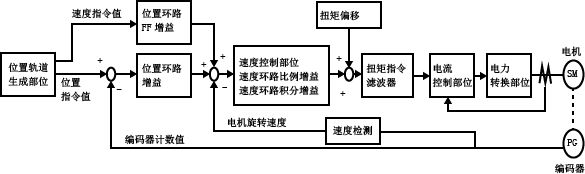
伺服系统由3个反馈系统(位置环路、速度环路、电流环路)组成,内侧的环路需要设定较高的应答性。无法确保内侧环路的应答性比外侧环路高很多时,应答性将降低并会产生振动。
需要用户调整位置环路和速度环路的增益。已确保电流环路具有足够的应答性。
ID : 4927
- 本页相关信息
- 手动增益调整的操作步骤
- 速度控制系统增益的简易调整方法