
ID : 6986
電動ハンドの使い方
基本的な動き
電動ハンドには2つのフィンガがあります。この2つのフィンガを、開いたり閉じたりして、ワークの把持・解放を行います。
片方のフィンガに荷重が集中しないように、ワークはフィンガの動作方向に移動できるように配置してください。
| フィンガを開いた状態 | フィンガを閉じた状態 |
|---|---|
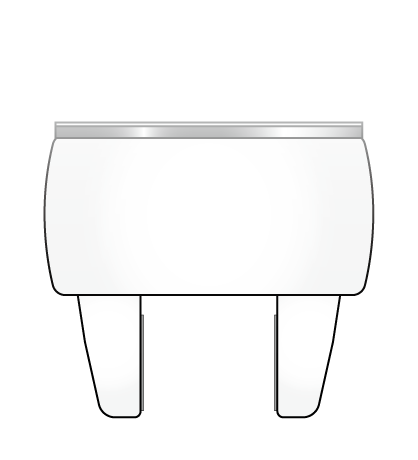 |
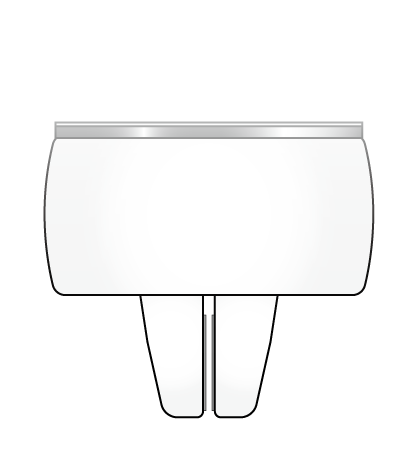 |
ワークの把持方法
ワークの形状により、フィンガを閉じて把持する場合と、フィンガを開いて把持する場合があります。
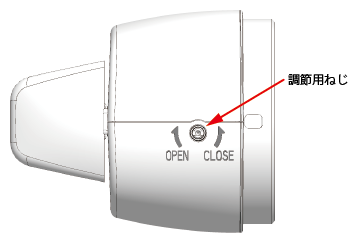
ワークを把持した状態でモータOFFにしてもセルフロック機構によりフィンガ位置がロックされるため把持力が維持されますが、振動や衝撃を伴う場合にはワークが落下する可能性があります。リスクアセスメントを実施していただき、ワークの落下による危険状態が発生しないように、適切な保護方策を講じてください。
モータOFFの状態でフィンガを移動させるには、ハンド側面の調節用ねじをマイナスドライバ等で回すことによって行えます。
場合 |
フィンガを閉じて把持する場合 |
フィンガを開いて把持する場合 |
|---|---|---|
| ワーク形状 | 外側を挟んで掴むもの 例:通常のワーク全般 |
内径を掴むもの 例:ビン、パイプ |
オプション品のCOBOTTA用電動グリッパでは、フィンガを開いて把持できません。フィンガを開いて把持する場合、グリッバまたはフィンガをお客様で用意する必要があります。フィンガの取り換えについては、製品情報の「COBOTTA用電動グリッパ」を参照してください。
ワークの幅の範囲
電動グリッパでつかむことができるワークの幅(フィンガでつかむ部分の幅)には限度がありますが、その限度はワークの把持方法によって異なります。ワークの幅の限度をワークの把持方法別に説明します。
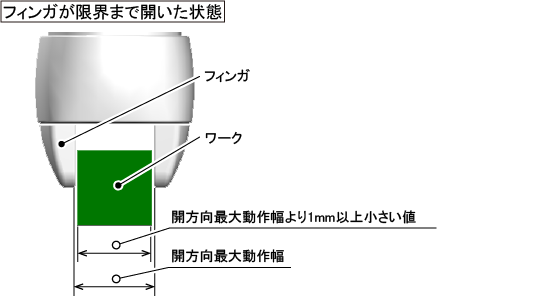
フィンガを閉じて把持する場合
フィンガが限界まで開いたときのフィンガ間の距離を、開方向最大動作幅と呼びます。
ワークの幅(フィンガでつかむ部分の幅)は、上記の開方向最大動作幅より1mm以上小さい値である必要があります。
電動グリッパはワークの把持状態(把持したかどうか)を検出することができます。しかし、ワークの幅が開方向最大動作幅より1mm以上小さい値ではない場合、把持状態を正しく検出できない可能性があります。
開方向最大動作幅は、ハンドパラメータの一つである"開方向ソフトウェアリミット"で変更することができます。したがって、"開方向ソフトウェアリミット"を変更した場合、その値より1mm以上小さい値が、つかむことのできるワークの幅となります(お客様オリジナルフィンガを使用する場合は、"開方向ソフトウェアリミット"の値に、標準フィンガの形状との差分をオフセットした値となります)。ハンドパラメータの変更方法については"使用準備"を参照してください。
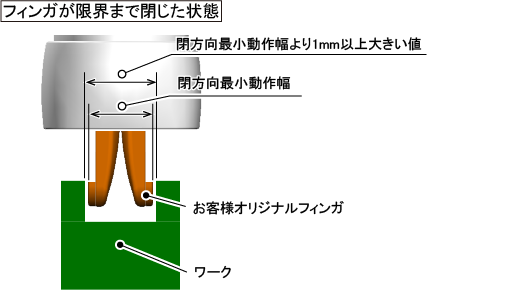
フィンガを開いて把持する場合
この把持方法は、お客様オリジナルフィンガを使用する場合のみ可能です。
フィンガが限界まで閉じたときのフィンガ間の距離を、閉方向最小動作幅と呼びます。
ワークの幅(フィンガでつかむ部分の幅)は、上記の閉方向最小動作幅より1mm以上大きい値である必要があります。
ワークの幅が閉方向最小動作幅より1mm以上大きい値ではない場合、把持状態を正しく検出できない可能性があります。
閉方向最小動作幅は、ハンドパラメータの一つである"閉方向ソフトウェアリミット"で変更することができます。したがって、"閉方向ソフトウェアリミット"を変更した場合、その値より1mm以上大きい値が、つかむことのできるワークの幅となります(実際には、"閉方向ソフトウェアリミット"の値に、標準フィンガの形状との差分をオフセットした値となります)。ハンドパラメータの変更方法については"使用準備"を参照してください。
ワークの開放方法
ワークの開放方法は、把持動作とは逆の動作を実施するのですが、その際に注意すべき事項があります。把持方法によって注意事項が異なるので、把持方法別に説明します。
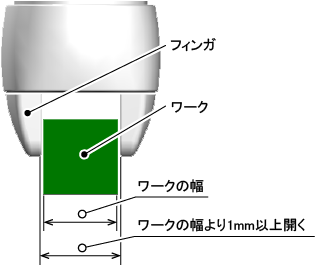
フィンガを閉じて把持する場合の開放方法
ワークの幅(フィンガでつかむ部分の幅)よりも1mm以上開いてください。電動グリッパはワークの把持状態(把持したかどうか)を検出することができます。しかし、1mm以上開かない場合、実際にはワークを開放したが、電動グリッパは、"ワーク把持中"と誤検出する可能性があります。
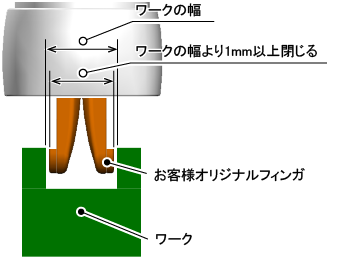
フィンガを開いて把持する場合の開放方法
この把持方法は、お客様オリジナルフィンガを使用する場合のみ可能です。
ワークの幅(フィンガでつかむ部分の幅)よりも1mm以上閉じてください。1mm以上閉じない場合、実際にはワークを開放したが、電動グリッパは、"ワーク把持中"と誤検出する可能性があります。
把持力の調整
ハンドを使用していると、使用したサイクル数に応じて把持力が変動する場合があります。ハンドの把持力が出荷時と比較して増加あるいは減少した際には、ハンド出力調整機能を使用して把持力を調整します。
この機能を使うと、コマンドの引数を一つ一つ調整しなくても、ハンドのモータ出力を一括して増減させることができます。詳細は「ハンド出力調整機能」を参照してください。
ハンド把持速度調整機能
ハンドの把持動作(手動動作、MoveH、MoveZH、MoveAH、MoveRH)の動作速度を、一括で変更する機能です。
詳細は「ハンド把持速度調整機能」を参照してください。
プログラムによるフィンガ操作
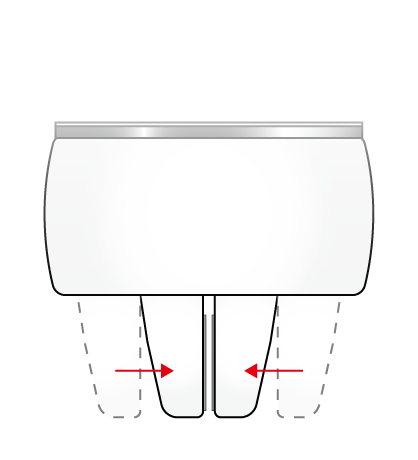
ふたつのフィンガはそれぞれ左右対称に動作します。 向かって右のフィンガ(右フィンガ)が右へ移動する場合は、同時に、もうひとつのフィンガ(左フィンガ)は左へ移動します。
ロボットの動作と連動してハンドを動作させる場合、フィンガの動作はプログラムで指定します。フィンガ間の距離を指定することにより、ハンド全体の動作が指定できます。
フィンガ間の距離が大きくなるように指示すると、ハンドは開く状態になります。反対に、フィンガ間の距離が小さくなるように指示すると、ハンドは閉じる状態になります。
| フィンガ間の距離が大きくなるよう指示 | フィンガ間の距離が小さくなるよう指示 |
|---|---|
開く動作
|
閉じる動作
|
フィンガの位置指定
フィンガの位置の指定方法には絶対的な位置を指定する方法と、相対的な位置を指定する方法があります。
絶対位置指定
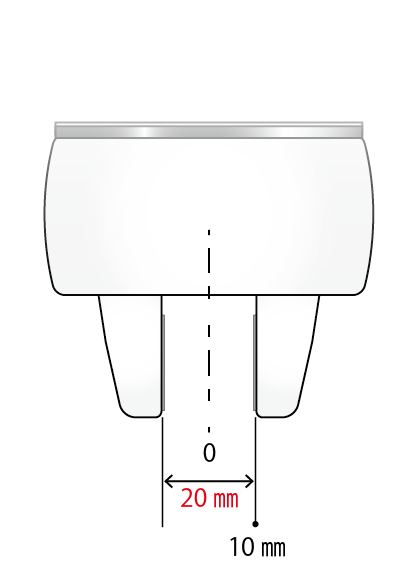
絶対位置指定の場合は、フィンガ間の距離を指定します。フィンガの稼働可能範囲は、フィンガ間の距離で0mm~30mmとなります。0mmは両フィンガが接触する位置です。
例えば、フィンガ間の距離を20mmに指定した場合、右フィンガは10mmの位置に移動し、左フィンガは反対方向の10mmの位置に移動します。ハンド全体としては20mm間隔に開いた状態になります。
| フィンガ間の距離を20mmに指定 |
|---|
 |
相対位置指定
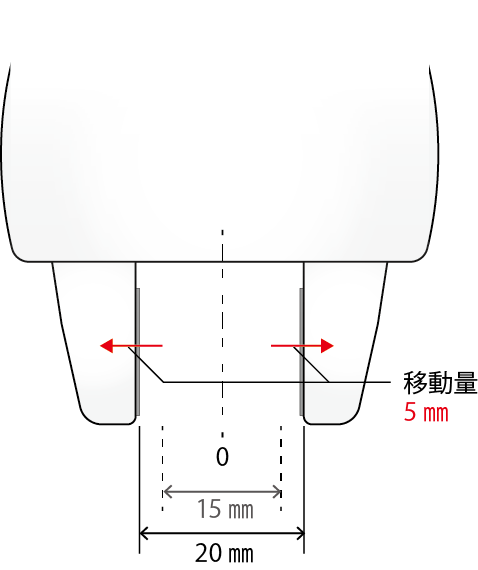
相対位置指定の場合は、フィンガ間の移動量を指定します。移動量が正の値の場合は、両フィンガは距離が大きくなるように移動量分だけ移動します。ハンド全体としては開く動作になります。
移動量が負の値の場合は、両フィンガは距離が小さくなるように移動量分だけ移動します。ハンド全体としては閉じる動作になります。
例えば、フィンガ間の距離が15mmの位置にあるときに、5mm相対移動させると、全体として20mm開いた状態になるので、右フィンガは10mmの位置に、左フィンガは反対方向に10mmの位置に移動します。
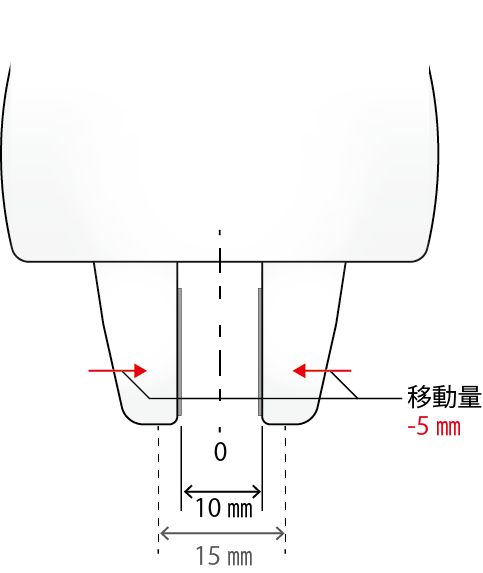
-5mm相対移動させた場合は、全体として10mm開いた状態になるので、右フィンガは5mmの位置に、左フィンガは反対方向に5mmの位置に移動します。
5mm相対移動 |
-5mm相対移動 |
|---|---|
 |
 |
- フィンガ間の距離が稼働範囲である 30mm より開いた状態で電源を入れた場合、フィンガ位置の初期化が上手くいかない可能性があります。
ハンド側面のねじを回してフィンガ間の距離が 30mm 以内になるように調整した後、電源を入れてください。 - ハンド側面のねじを手動で回してハンドを調整する際に、ハンドの爪位置が可動範囲の外に出た場合は、爪位置が可動範囲内になるように調整してください。ハンドの爪位置が可動範囲の外に出ている場合、ハンドが動かない場合があります。
ポイントデータ
プログラムには、コマンドで、直接、フィンガの動作のしかたと位置や移動量を指定する方法と、あらかじめ動作のしかたと、位置や移動量をポイントデータと呼ばれるデータ形式で記憶させ、コマンドでは、そのポイントデータを呼び出して使用する方法があります。
ポイントデータはロボットの位置教示の際に、手動でハンドの開閉動作を行って、その結果を記憶させることができるので、たいへん便利です。
| 種類 | コマンド |
|---|---|
| あらかじめ設定したポイントデータを使用 | |
| フィンガの動作のしかたと、位置や移動量をコマンドで直接指定 | HandMoveA |
ID : 6986