
ID : 7149
使用準備
電動ハンドを使用する前に、ハンドパラメータの設定を行います。[57:ハンド種類]は必須ですが、その他のハンドパラメータは必要があれば設定します。
ハンドパラメータの設定は、リモートTPまたはバーチャルTPを操作して行います。
リモートTP、バーチャルTPの使用方法については、 "TPアプリ操作ガイド" を参照してください。
手順
1
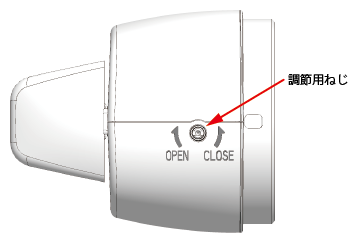
モータOFFの状態で電動ハンドのフィンガが30mmより開いている場合は、ハンド側面の調節用ねじをマイナスドライバ等を使って"CLOSE"方向に回し、フィンガを閉じてください。
2
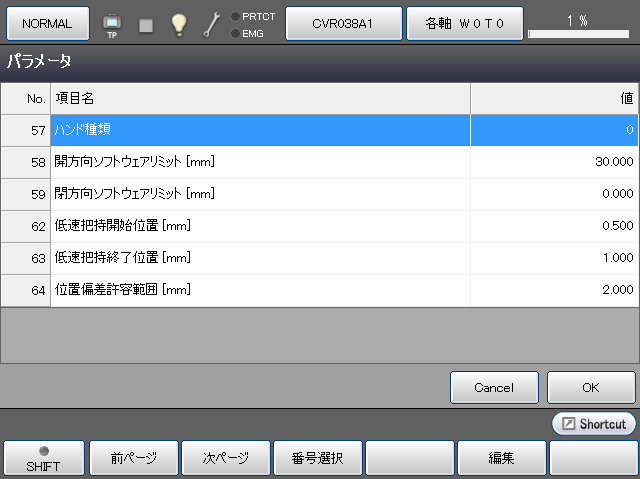
以下の経路でハンドパラメータの設定画面を開きます。
操作経路:基本画面-[F9 ハンド]-[F6 補助機能]
3
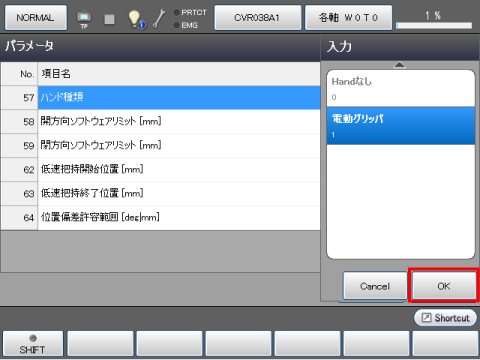
[57:ハンド種類]を選択し、[F5 編集]ボタンを押します。
入力ウィンドウが開きますので、[電動グリッパ]を選択し、[OK]ボタンを押します。
4
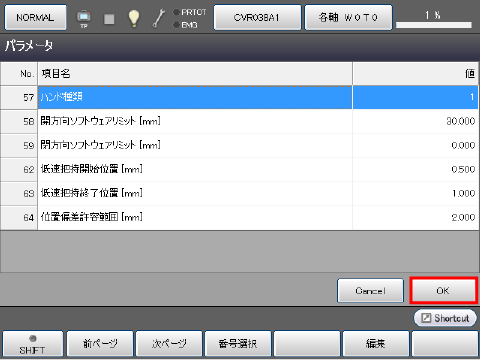
パラメータ画面で[OK]ボタンを押します。
5
パラメータの変更が成功すると、システムメッセージが表示されますので、[OK]ボタンを押してメッセージを消します。
COBOTTAの電源をいったん切り、再投入します。
いったん電源を切って、再投入しないと、このパラメータ設定は有効になりません。
6
その他のハンドパラメータには下記のものがあります。
初期値から変更が必要な場合は、Step2~Step4の手順で実施してください。その他のパラメータは設定後すぐに有効になり、電源の再投入は不要です。
| パラメータ種類 | 内容 |
|---|---|
| ハンド種類 | 0: Handなし/1:電動グリッパ |
| 開方向ソフトウェアリミット[mm] (*1) |
フィンガを開く方向の可動限界を設定します。 範囲:0~30 初期値:30 |
| 閉方向ソフトウェアリミット[mm] (*1) |
フィンガを閉じる方向の可動限界を設定します。 範囲:0~30 初期値:0 |
| 低速把持開始位置[mm] (*2) | HandChuckコマンドで、[加減速絶対位置移動・把持]、[加減速相対位置移動・把持]モード指定時と、HandMoveAH、HandMoveRHコマンド実行時の低速把持開始位置を指定します。 |
| 低速把持終了位置[mm] (*2) | HandChuckコマンドで、[加減速絶対位置移動・把持]、[加減速相対位置移動・把持]モード指定時と、HandMoveAH、HandMoveRHコマンド実行時の低速把持終了位置を指定します。 |
| 位置偏差許容範囲[mm] (*2) | HandUnChuckコマンドで[絶対位置動作]、[相対位置動作]モード指定時と、HandMoveA、HandMoveR コマンド実行時の、位置偏差の許容値を設定します。 |
(*1) 開方向ソフトウェアリミットの値が、閉方向ソフトウェアリミットの値より小さい場合は、エラーになります。
(*2) "電動ハンドの動作モード" を参照してください。
ID : 7149