
ID : 3107
使用机内配线的配线
VS机器人的通信电缆法兰规格-A时,如下所示,可以在机器人控制器和力感应器的配线中使用机器人机内配线。
系统构成
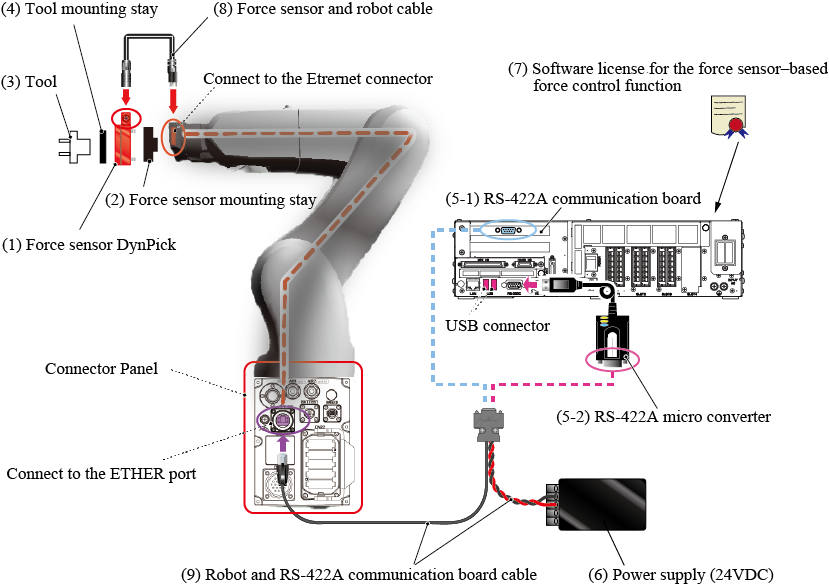
上图为VS-050连接面板背面规格时的图。
连接面板内的连接器配置因机型而异。请参照VS机器人使用说明书中的“连接器”。
| 构件/ 制造商/类型(选件号) |
内容 | ||||
|---|---|---|---|---|---|
(1)力感应器株式会社Wacoh-tech
|
静电容量型力感应器Dyn-Pick。 请根据使用状况选择。 |
||||
(2)力感应器安装撑条由客户制作 |
用于将力感应器安装到机器人前端。 详细内容,请参照“力感应器的安装方法”制作。 |
||||
(3)工具由客户选定 |
请根据客户的规格选择。 | ||||
(4)工具安装撑条由客户制作 |
用于将力感应器安装到工具。 请参照“硬件的准备”中的“力感应器概要”安装尺寸图进行制作。 |
||||
可以从以下2个当中选择通过RS-422A通信使力感应器和机器人控制器进行通信的设备。
|
|||||
(6)电源(DC24V)由客户选定 |
向力感应器供电的电源装置。连接力感应器-RS-422A通信板间电缆的红黑2根电缆。
其他详细信息请参照“DynPick 静电容量型6轴力反馈感应器 WEF-6A 系列”的使用说明书。 有关使用说明书请咨询株式会社Wacoh-tech。 请注意红(+24V)、黑(0V)的连接不要有误。如果错误,会导致力感应器损坏。 |
||||
(7)利用力感应器的力量控制功能软件许可证株式会社DENSO WAVE
|
这些是本公司的产品。 使用利用力感应器的力量控制功能的许可证。 “将功能设为有效后出厂”就是在机器人组出厂时,预先将功能设为有效后再出厂。请在订购机器人组时提出。 在通过已购买的机器人组使用功能时,请订购“仅许可证”。“仅许可证”时,需要注册许可证,将客户机器人控制器的功能设为有效。 关于将功能设为有效的步骤请参照“功能的有效化”。 |
||||
(8)力感应器-机器人间电缆株式会社Wacoh-tech
|
连接力感应器和机器人间的电缆。 | ||||
(9)机器人-RS-422A通信板间电缆株式会社Wacoh-tech
|
将RS-422A通信设备(RS-422A通信板或RS-422A微型转换器)及24V直流稳定电源连接到机器人的电缆。 请根据使用状况选择电缆长度。 |
||||
*1 : 到2018年7月份左右销售CWE-6AE180-SA(电缆长180mm)。
ID : 3107