
ID : 1133
使用ATI Industrial Automation制力感应器时的硬件准备
在这里说明使用利用力感应器的力量控制功能时,使用ATI Industrial Automation制的力感应器时所需的设备。
- 该制造商的力感应器在机器人控制器的软件版本为Ver.2.11.0以上时可使用。
- 使用协调功能时,该制造商的力感应器无法使用。
可使用的力感应器
在ATI Industrial Automation制的力感应器中,可使用下表的产品。
型式 |
额定负荷 |
|||
|---|---|---|---|---|
Fx、Fy [N] |
Fz [N] |
Tx、Ty [Nm] |
||
Axia80-M8 |
(*1) |
±150 |
±470 |
±8 |
Axia80-M20 |
±500 |
±900 |
±20 |
|
Axia80-M50 |
±1200 |
±2000 |
±50 |
|
Nano17 Titanium |
(*2) |
±32 |
±56.4 |
±200 |
Nano17 |
±50 |
±70 |
±500 |
|
Nano17 IP65/IP68 |
||||
Nano25 |
±250 |
±1000 |
±6 |
|
Nano25 IP65/IP68 |
||||
Nano43 |
±36 |
±36 |
±500 |
|
Mini27 Titanium |
±80 |
±160 |
±4 |
|
Mini40 |
±240 |
|||
Mini40 IP65/IP68 |
||||
Mini45 Titanium |
±240 |
±480 |
±12 |
|
Mini45 |
±580 |
±1160 |
±20 |
|
Mini45 IP65/IP68 |
||||
Mini58 |
±2800 |
±6800 |
±120 |
|
Mini58 IP60 |
||||
Mini58 IP65/IP68 |
||||
Mini85 |
±1900 |
±3800 |
±80 |
|
Gamma |
±130 |
±400 |
±10 |
|
Gamma IP60 |
||||
Gamma IP65 |
||||
Gamma IP68 |
||||
Delta |
±660 |
±1980 |
±60 |
|
Delta IP60 |
||||
Delta IP65 |
||||
Delta IP68 |
||||
Theta |
±2500 |
±6250 |
±400 |
|
Theta IP60 |
||||
Theta IP65/IP68 |
||||
Omega85 |
±1900 |
±3800 |
±80 |
|
Omega85 IP65/IP68 |
||||
Omega160 |
±2500 |
±6250 |
±400 |
|
Omega160 IP60 |
||||
Omega160 IP65/IP68 |
||||
Omega191 |
±7200 |
±18000 |
±1400 |
|
Omega191 IP60 |
||||
Omega191 IP65/IP68 |
||||
Omega250 IP60 |
±16000 |
±32000 |
±2000 |
|
Omega250 IP65/IP68 |
||||
Omega331 |
±40 |
±88 |
±6 |
|
|
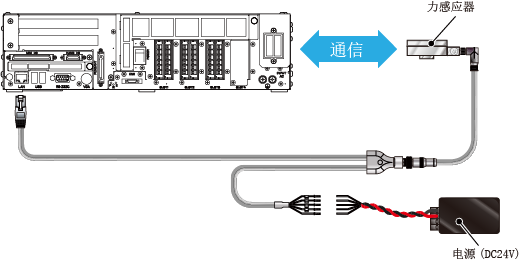
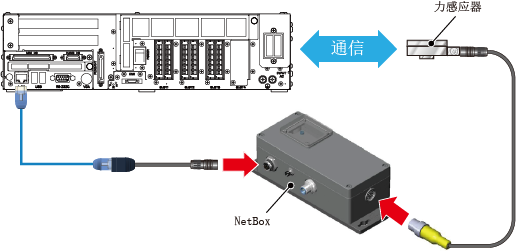
*1, *2 : 机器人控制器和力感应器的连接方法有2种。也就是使用NetBox这种通信接口的方法和不使用它的方法。上表中记为(*1)的型式的力感应器不使用NetBox (以下称为“直接连接型力感应器”)。记为(*2)的型式的力感应器使用NetBox (以下称为“NetBox连接型力感应器”)。
|
||||
上述各力感应器的信息是全部信息的一部分。关于外形尺寸及环境条件等上述以外的信息,请参照购买力感应器时包装中附带的使用说明书或者ATI Industrial Automation的主页中记载的使用说明书。
硬件的准备
使用直接连接型力感应器或NetBox连接型力感应器,要准备的硬件是不同的。
详细内容请参照以下链接。
| 力感应器 |
系统构成 (链接) |
|---|---|
| 直接连接型力感应器 | 使用直接连接型力感应器时的硬件准备 |
| NetBox连接型力感应器 |
ID : 1133