
ID : 3106
RS-422A通信板的设定
这里就RS-422A通信板的设定方法进行说明。
设定步骤
按照以下步骤实施。
- 设定DIP开关
- 将端口安装在控制器上
- 用多功能教导器进行设定
DIP开关的设定
如下设定使用通道的DIP开关。
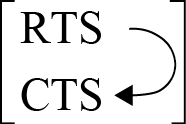
- 将数据传送模式设定成“以全双工使RTS、CTS自我循环”。
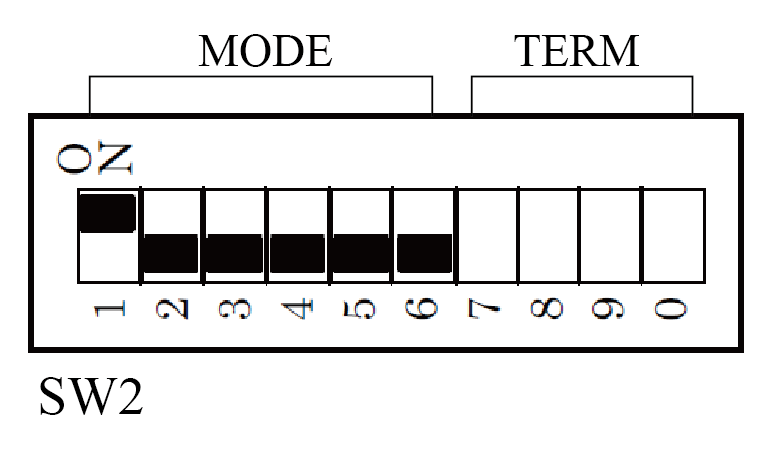
- 将终结器设定成“插入”。
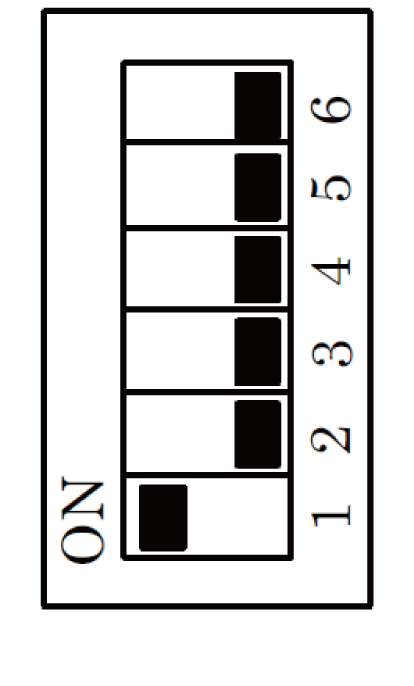
1通道件:COM-1PD(LPCI)H的设定
DIP开关的位置

设定方法
| 模式 | 设定方法 |
|---|---|
・全双工
|
请不要同时将位1和位2同时设成ON。可能导致板的故障。 |
| 插入终结器 | 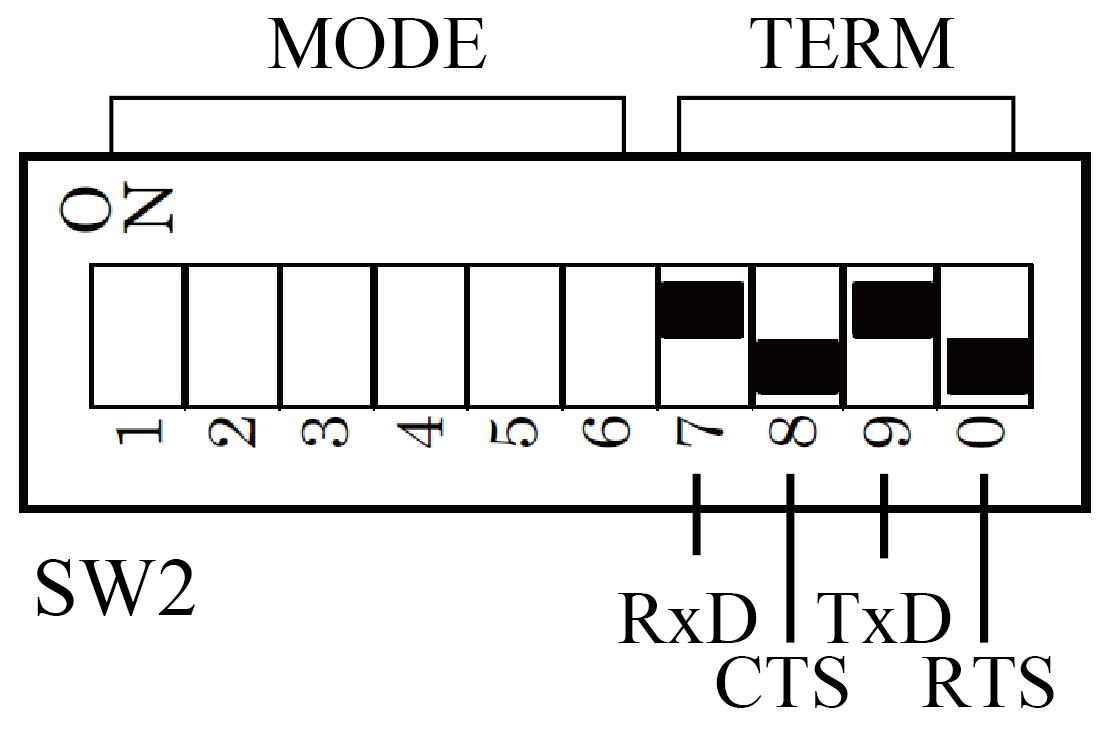 |
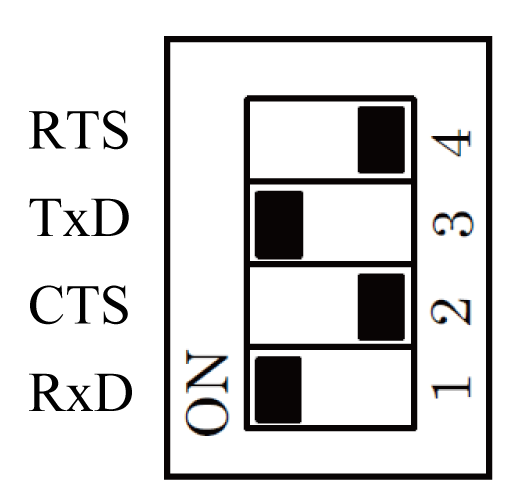
2通道件:COM-2PD(PCI)H或4通道件:COM-4PD(PCI)H的设定
任何通道都可使用。请使用任意通道。
DIP开关的位置
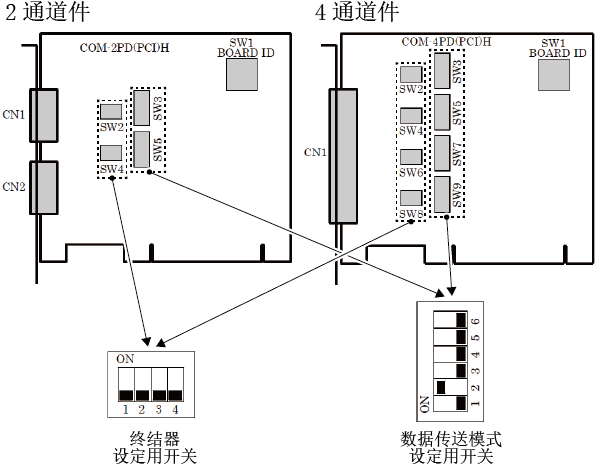
- 2通道件开关
-
终结器
设定用开关数据传送模式
设定用开关通道 SW2 SW3 CH1(CN1)用 SW4 SW5 CH2(CN2)用 - 4通道件开关
-
终结器
设定用开关数据传送模式
设定用开关通道 SW2 SW3 CH1用 SW4 SW5 CH2用 SW6 SW7 CH3用 SW8 SW9 CH4用
设定方法
设定连接力感应器的通道DIP开关。
| 模式 | 设定方法 |
|---|---|
・全双工
|
如下图设定数据传送模式设定用开关。
请不要同时将位1和位2同时设成ON。可能导致板的故障。 |
| 插入终结器 | 如下图设定终结器设定用开关。
|
板的安装
在PCI槽中安装推荐板。
安装方法请参照RC8系列机器人控制器说明书中的“增设板的安装”。
在多功能教导器上设定
用多功能教导器进行以下2个设定。
- 将FIFO缓冲设为有效
- 将连接模式设为RS-422A,指定端口
将FIFO缓冲设为有效
操作路径:[F6 设定]-[F5 通信与启动权]-[F2 网络与通信权]
从装置中选择连接到力感应器的“RS-422A”端口。
选择设定内容中的FIFO缓冲,按下“编辑”按钮。
显示[FIFO缓冲]视窗后,选择“使用”,按下“OK”。
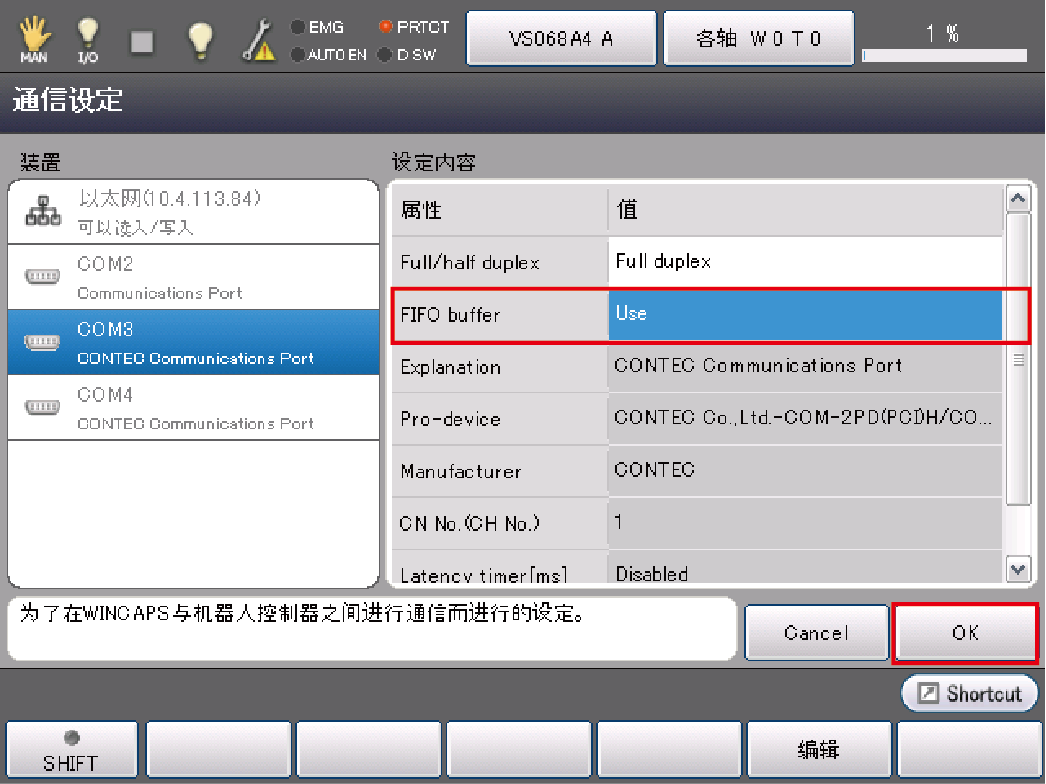
设定完后,在“通信设定”画面按下“OK”。
在“传感器的设定”的“RS-422A通信的设定”中的用户端口编号输入在此选择的COM编号。
将连接模式设为RS-422A
设定力感应器时一起进行。
有关详细内容请参照“传感器的设定”中的“RS-422A通信设定”。
ID : 3106