
ID : 2892
编程
表示样品程序。
- 教导4轴机器人的动作时,使J4的角度接近0度。
- 最佳速度控制设定 (SpeedMode)选择(0)无效或者1(PTP)进行使用。
- 教导检查时,无法使用跟踪的指令。 如果试图运行跟踪的指令,则将发生“82201808 请调整为自动模式后执行”。
- 多台机器人时,各子局按照与主局相同的步骤获取工件的数据。
- 对同一工件跟踪2次以上时,由于校准精度的问题,工件可能被重复登录。请再次实施校准。
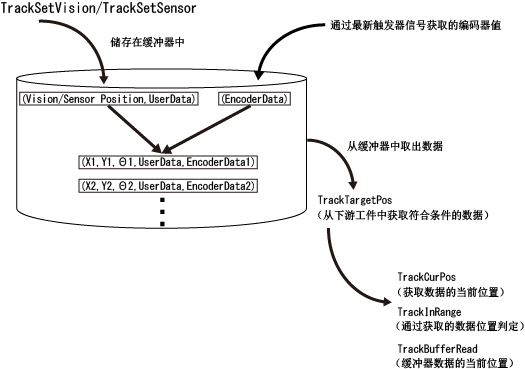
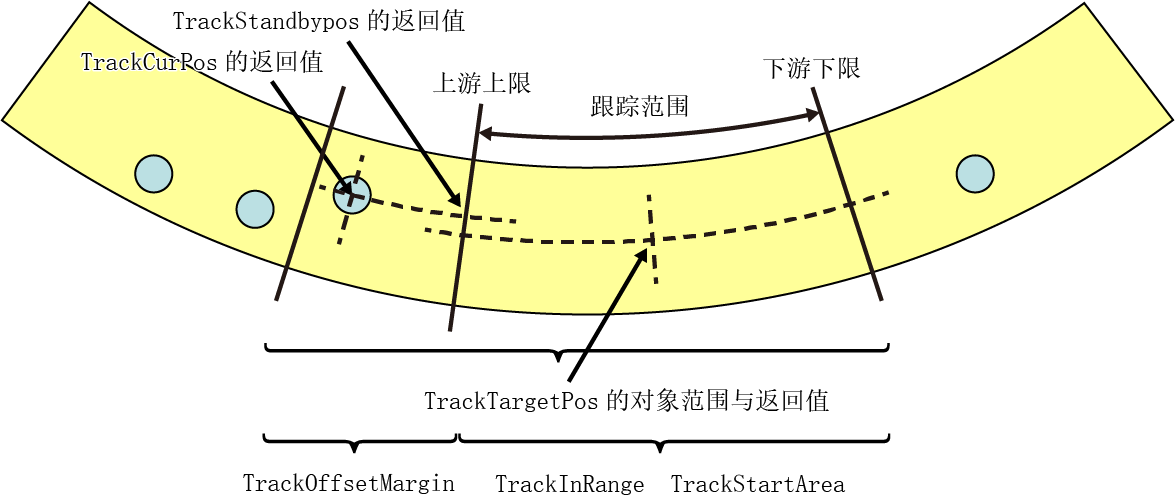
各指令的返回值所示的位置
相关项目
TrackCurPos、TrackInRange、TrackOffsetMargin、TrackStandByPos、TrackTargetPos
ID : 2892