
ID : 2894
传感器跟踪的编程示例
传感器跟踪时的编程示例如下所示。
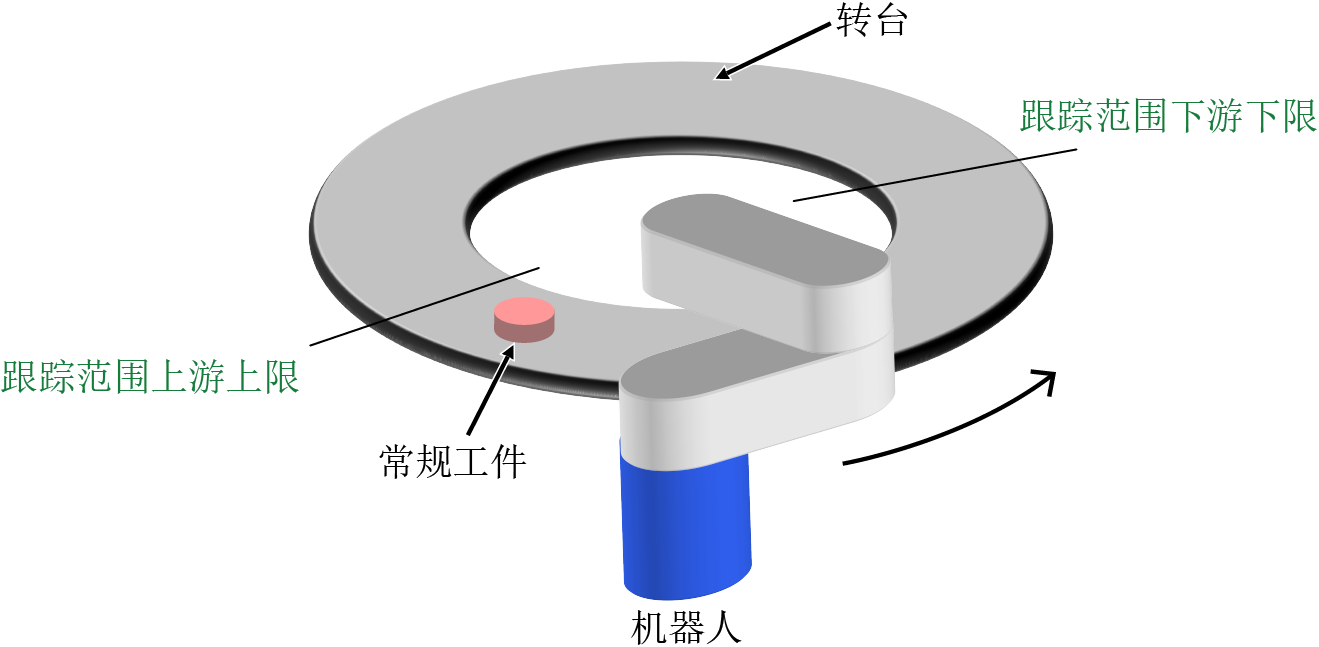
以跟踪范围中收纳的长工件为对象。
应用示例
可通过以下3个程序执行传感器跟踪。
1.主程序(SensorTracking.pcs (PCS:280B))
清空传送带1的跟踪缓冲区,开始传感器发出信号的触发器检测。
TrackInitialize 1, 0并列执行工件检测程序、跟踪动作程序。
Run Sensor
Run Tracking2.工件检测程序(Sensor.pcs (PCS:2KB))
检测上升沿。
Wait IO[48] = OFF
Wait IO[48]将最新的传感器检测坐标(编码器值)添加到workNum所指定个数的跟踪缓冲区。
此时,可将workNum所指定个数的用户数据作为Variant型排列进行附加。
TrackSetSensor 1, workNum, arrayUser3.跟踪动作程序(Tracking.pcs (PCS:2KB))
通过TrackStart指令,开始圆形跟踪前向初始位置移动。
请注意,在圆形跟踪中,如果执行Move指令等常规动作指令,将中断跟踪动作。
Move P, P[50]每次检测到工件时,用于执行跟踪、挑选动作的主循环。
将内部I/O的ON信号设定为循环继续的条件,以便可在中途结束循环。
Do
P[10] = TrackTargetPos(1)
...
TrackApproach P, P[10], 50
...
LOOP UNTIL IO[128] = ON循环内的处理。
首先,从跟踪缓冲区调取工件数据,将其设定为跟踪对象工件。
未检测到工件时,在此行待机,直至检测到工件且跟踪缓冲区装满数据。
P[10] = TrackTargetPos(1)指示跟踪模式开始。在执行此指令阶段,机器人尚未开始移动。
执行TrackApproach指令等跟踪动作指令并开始初次移动。
TrackStart 1 Wait TrackInRange(1), 10000, timeoutFlg一边为与转台等速执行跟踪动作,一边从跟踪对象工件朝上方50mm的趋近位置移动。
TrackApproach P, P[10], 50一边为与转台等速执行跟踪动作,一边朝跟踪对象工件接近。
TrackMove P, P[10]一边为与转台等速执行跟踪动作,一边从跟踪对象工件朝上方离开50mm。
TrackDepart P, 50指示跟踪模式结束。结束转台追踪动作并减速停止。
执行此指令前,工件超出跟踪范围下游下限时,将发生错误。
TrackStop将挑选的工件搬运至排出位置。
Approach P, P[52], 50ID : 2894