
ID : 2897
使用区域功能的设备保护
转台与机器人的干涉
机器人控制器一律不保持与转台的高度方向有关的信息。为此,如下图所示,在圆形跟踪过程中,机器人与转台可能发生碰撞。
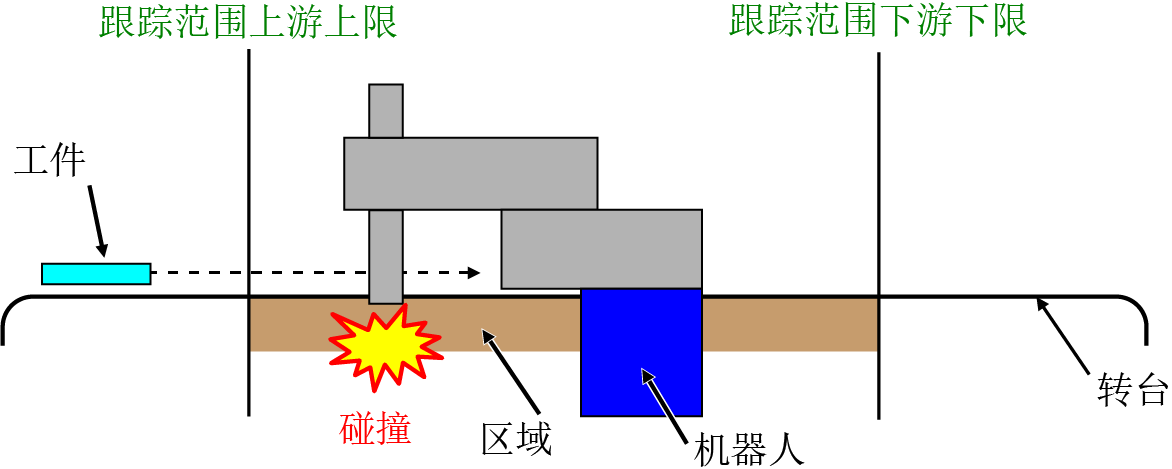
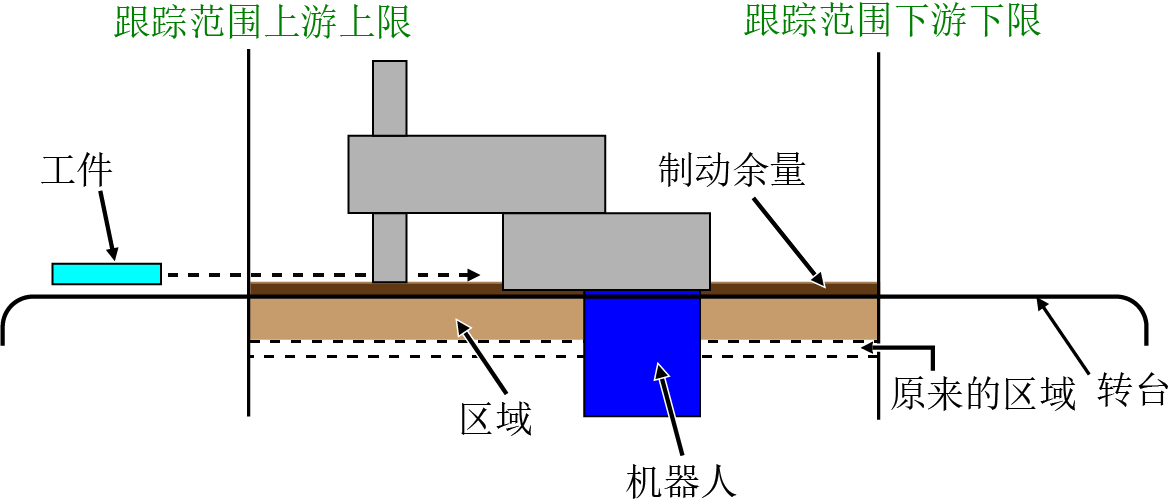
为了防止转台与机器人的意外干涉,我们建议使用区域功能,进行干涉检查。此时,即使检出干涉机器人也不能发生停止,因此需要一定量的制动余量。
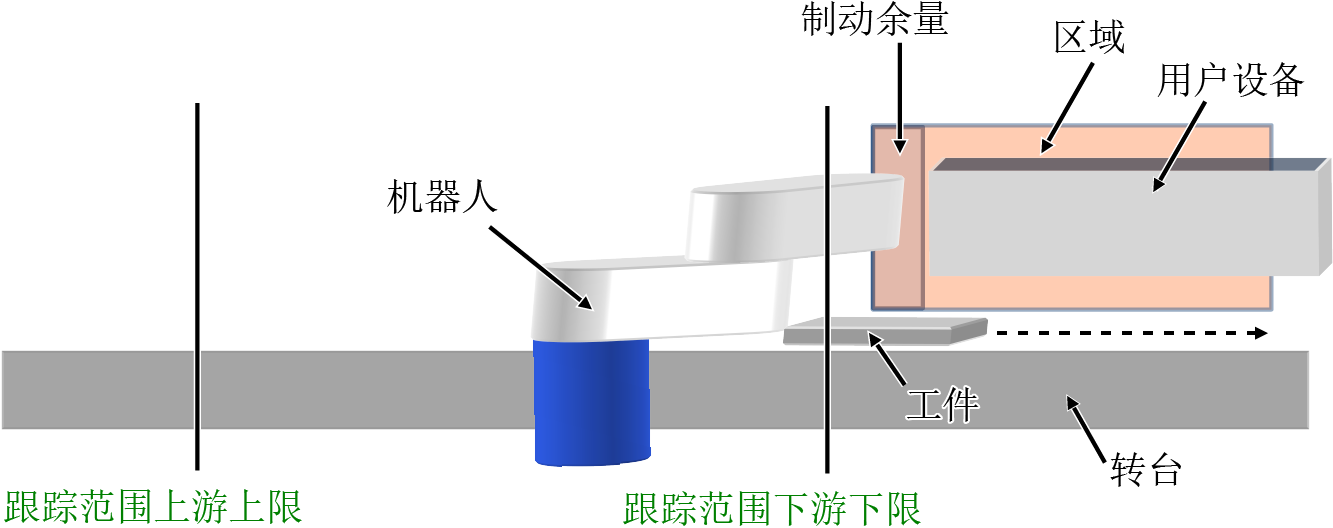
位于跟踪范围后方的设备与机器人的干涉
在RC8系列的圆形跟踪中,为了明确机器人追随转台的范围,设置了跟踪范围下游下限。机器人超过跟踪范围下游下限后,减速停止。另外,将“TrackStart”指令的选项2的设定设为有效时,机器人会超过跟踪范围下游下限动作。
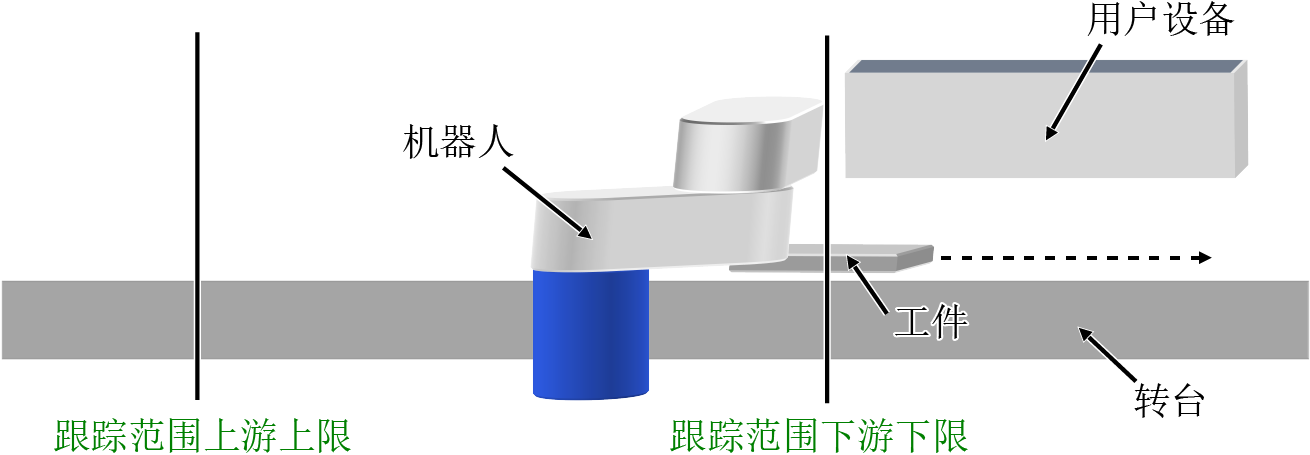
如果不针对跟踪范围下游下限设定足够的余量,如下图所示,设备与机器人发生干涉。
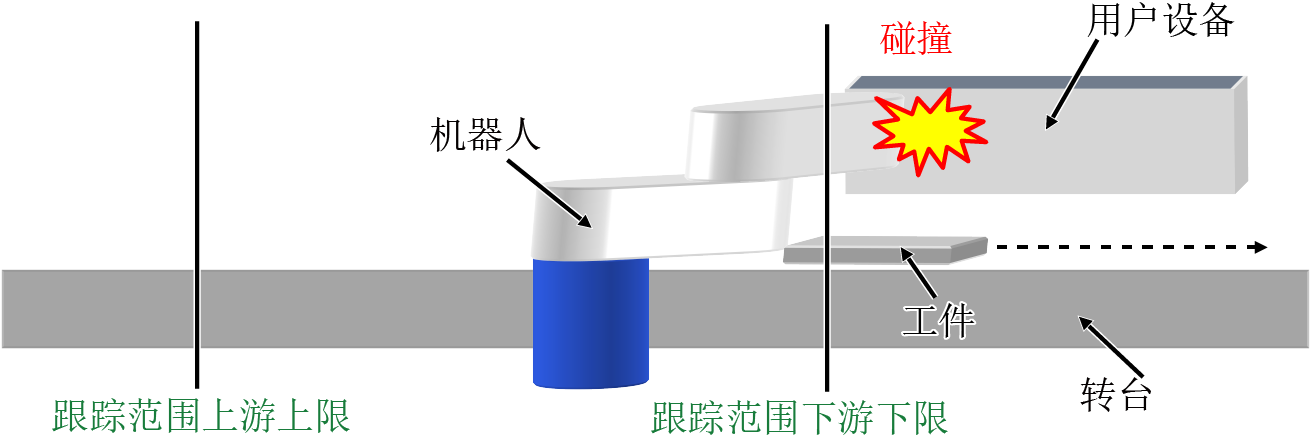
请充分注意与设置在跟踪范围下游下限后方的设备的干涉。我们建议使用区域功能,进行干涉检查。此时,即使检出干涉机器人也不能发生停止,因此需要一定量的制动余量。
除了区域功能外,还有以下的避免与设备干涉的方法。
- 使用TrackInRange指令,确认工件是否未超过下游下限。
- 使用TrackCurPos指令,监视工件的当前位置。
- 使用TrackArrivalTime指令,确认到达下游下限的时间。
ID : 2897