
ID : 3047
圆形跟踪的目标位置调整与相对动作
在圆形跟踪运行中调整目标位置,或进行相对动作时,将通过TrackShiftTarget指令及TrackDraw指令指定偏移量。此时的偏移量通过传送带坐标系指定。
此指令对Ver.2.3.*以上的版本有效。
传送带坐标系
圆形跟踪时,定义下图所示坐标系。
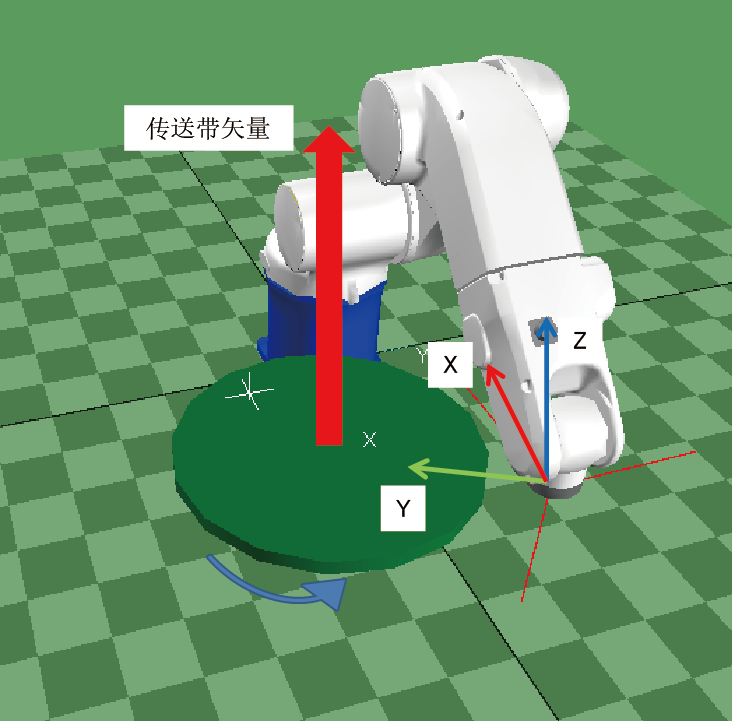
此处,X轴、Y轴、Z轴如下表进行定义。Z轴以外在执行指令时通过基准位置进行计算。
| 轴 | 定义 |
|---|---|
| X轴 | 基准位置中转台的接线方向(工作台行进侧) |
| Y轴 | 连接基准位置与工作台中心的矢量 |
| Z轴 | 传送带矢量 |
基准位置如下表所示,其会因指令而有所不同。
| 指令 | 基准位置 |
|---|---|
| TrackShiftTarget | 当前的工件位置 |
| TrackDraw | 机器人当前位置 |
目标位置调整
如下图所示,希望调整传送带跟踪动作的目标位置时,将使用TrackShiftTarget指令。
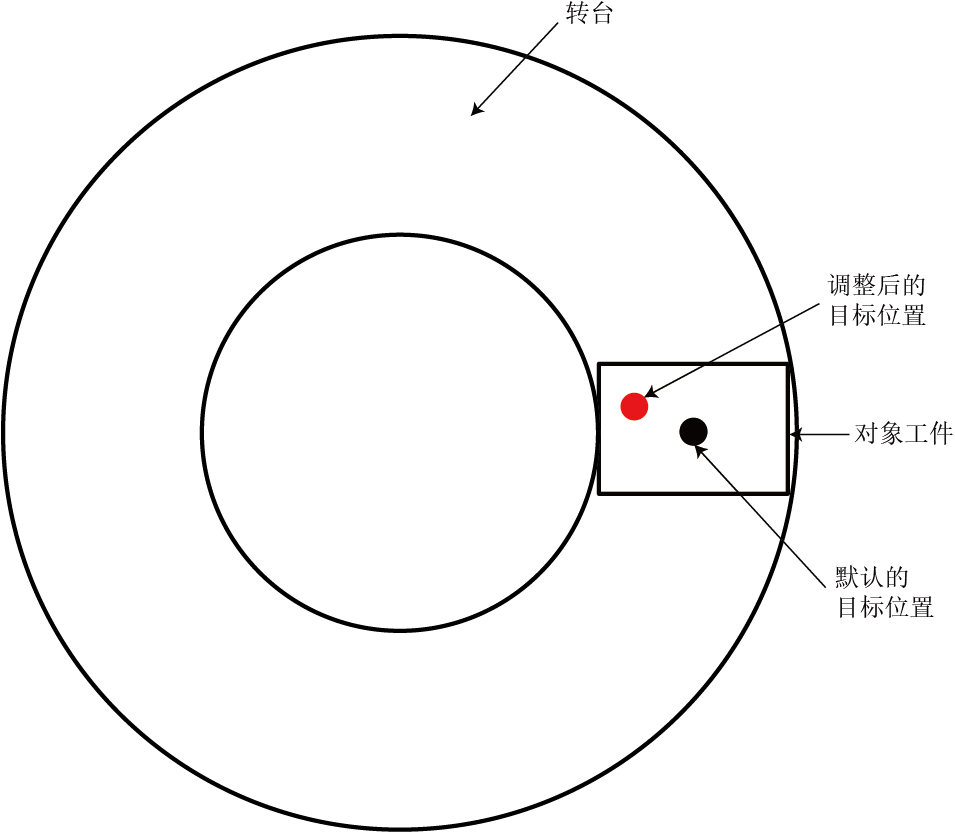
如下所示进行编程。
P10 = TrackTargetPos(1)
TrackShiftTarget 1, V(5, 10, 0)
TrackMove P, P10 该例中,通过TrackMove,相对于默认目标位置,在向转台接线方向偏移5mm,并向连接目标位置与工作台中心的矢量方向偏移10mm的位置进行动作。
相对动作
如下图所示,希望在调整传送带跟踪运行中进行相对动作时,将使用TrackDraw指令。
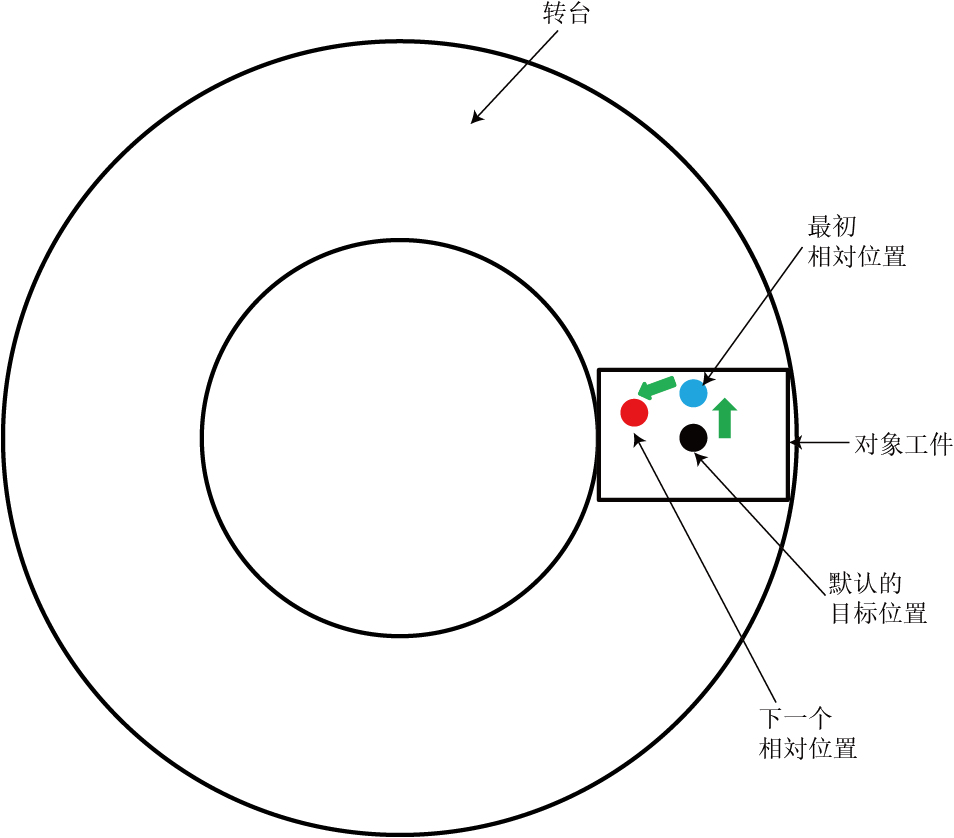
如下图所示进行编程。
P10 = TrackTargetPos(1)
TrackMove P, P10
TrackDraw P, V(5, 0, 0)
TrackDraw P, V(0, 10, 0) 该例中,通过TrackMove,向默认目标位置进行动作,并通过TrackDraw向该处至转台接线方向偏移5mm的位置进行动作。此外,通过以下TrackDraw,在从该处距离连接工作台中心的矢量方向10mm的位置进行动作。
ID : 3047