
ID : 5355
TrackInRange
格式
TrackInRange (传送带编号[, 偏移量[, 下游下限检查]])
指定项目
- 传送带编号
-
使用整数型数据指定需使用的传送带编号(1~16)。
(Ver.1.11.*以前只有传送带1、传送带2才能指定。) - 偏移量
- 通过双精度实数型指定偏移距离。
传送带跟踪时的单位为[mm],圆形跟踪(Ver.2.3.*以上)时的单位为[deg]。
如果指定正值,则向传送带矢量方向偏移,如果指定负值,则向与传送带矢量相反的方向偏移。
偏移值为距传送带校准时确定的工件上的基准位置的距离。
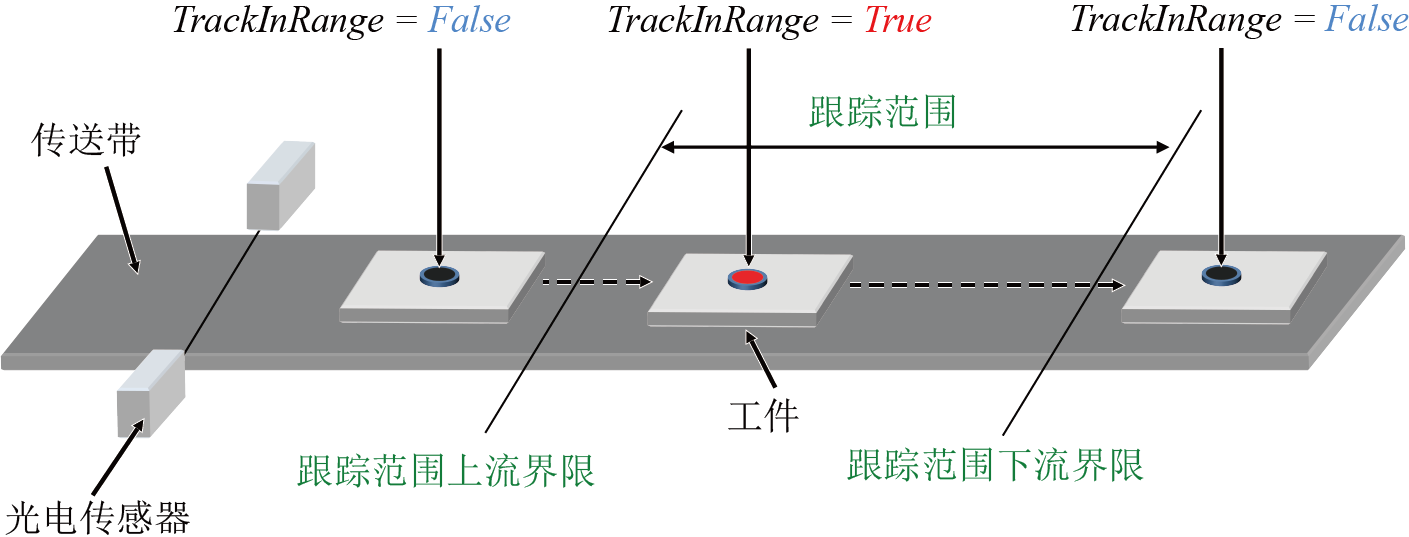
此值用于判断跟踪范围内是否有工件,并确定工件上的一点。
如果偏移值为“0”,前述基准位置位于跟踪范围内,则判断“工件位于跟踪范围内”。
可省略。省略时变为指定“0”。 Ver.1.10.*及更高版本可使用该项目。 - 下游下限检查
-
指定在跟踪范围内下游下限检查的有效/无效。
无效时指定VARIANT_TRUE(-1),有效时指定VARIANT_FALSE(0)。
可省略。省略时指定VARIANT_FALSE(0)。
如果设为无效,不检查是否在下游下限的上游。Ver.1.12.1及更高版本可使用该项目。
返回值
相关项目
TrackStartArea、 TrackOffsetMargin、 TrackTargetPos、 TrackStandByPos、 TrackCurPos、 TrackCount、 TrackArrivalTime、 传送带跟踪用指令、圆形跟踪用指令
注意事项
这是传送带以及圆形跟踪专用指令。
ID : 5355