
ID : 5324
概要
传送带跟踪和附加轴跟踪
什么是传送带跟踪?
不用停止传送带,机器人就可夹持传送带运来的工件的功能。
传送带跟踪有以下2种。
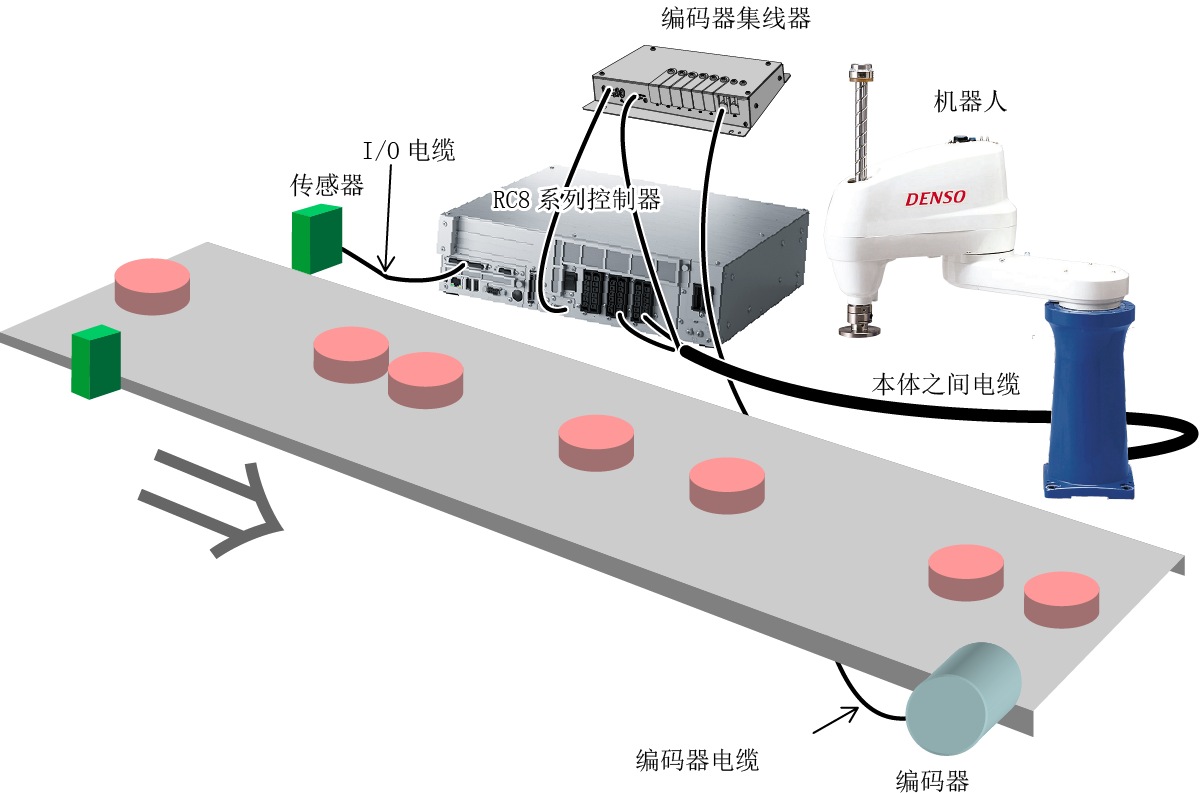
- 传感器跟踪
- 挑选以任意间隔排成直线传送过来的工件时使用。
当工件横穿光电传感器前方时触发信号的方式。
事前登录工件横穿光电传感器前方时的工件所处的位置,在每次触发后都依次计算工件流到何处,使机器人追踪该工件。 - 视觉跟踪
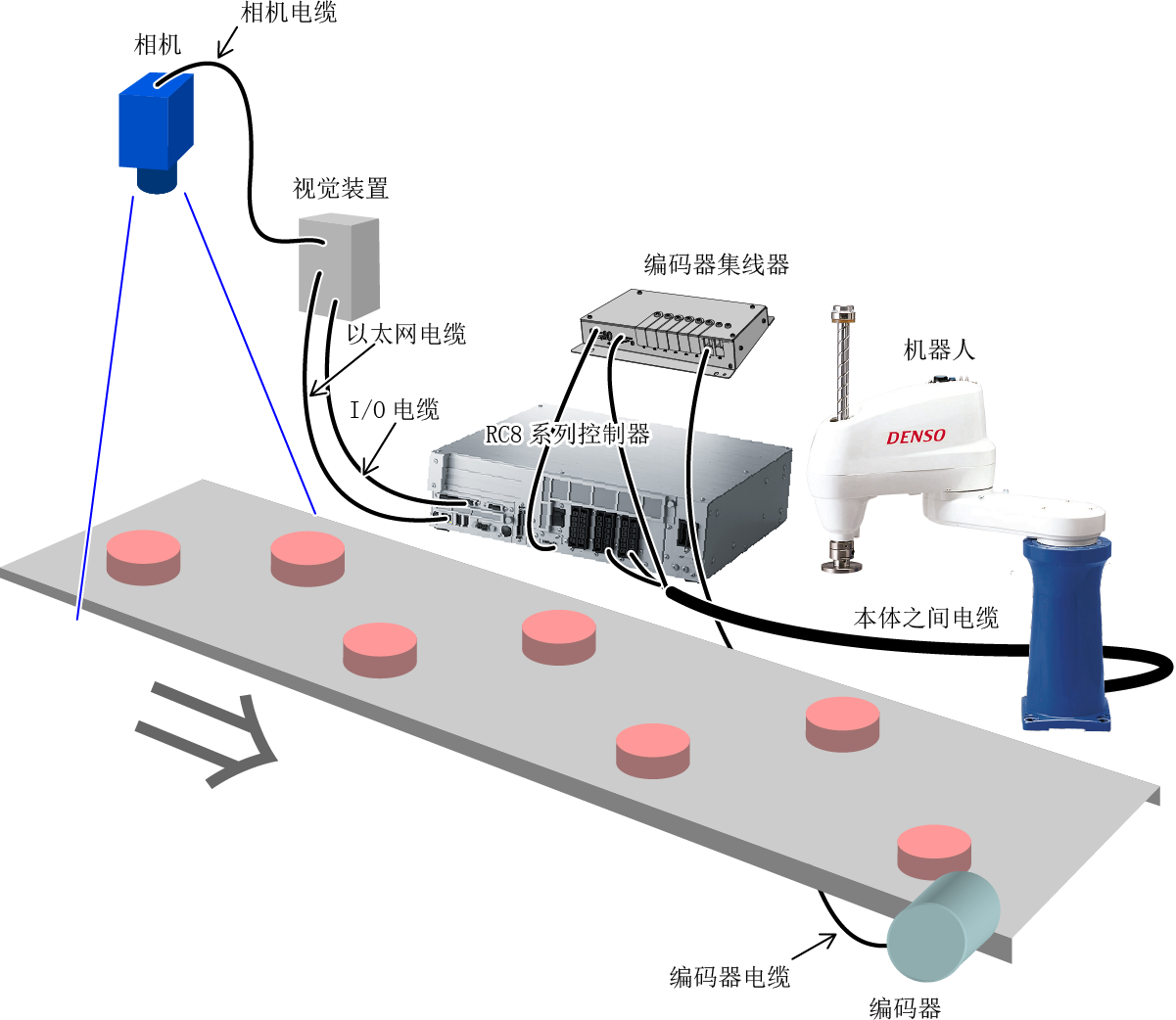
- 挑选以任意的位置和姿势摆放,传送过来的工件时使用。
当视觉传感器通过图像识别检出工件时,触发信号的方式。
每次触发后,登录通过图像识别检出的工件位置和姿势,依次计算工件流到何处,使机器人追踪该工件。
传感器跟踪和视觉跟踪功能不能与协调功能、力量控制一起使用。
在Ver.2.8.*以后能够与排他控制同时使用。
附加轴跟踪
附加轴跟踪指,不用停止传送带,机器人就可夹持用附加轴驱动的传送带运来的工件的功能。
通过附加轴进行传送带驱动的点与传送带跟踪不同。对于其他,与传送带跟踪相同。
附加轴跟踪也有传感器跟踪与视觉跟踪2种。

传感器跟踪和视觉跟踪功能不能与协调功能、力量控制一起使用。
在Ver.2.8.*以后能够与排他控制同时使用。
启用传送带跟踪功能
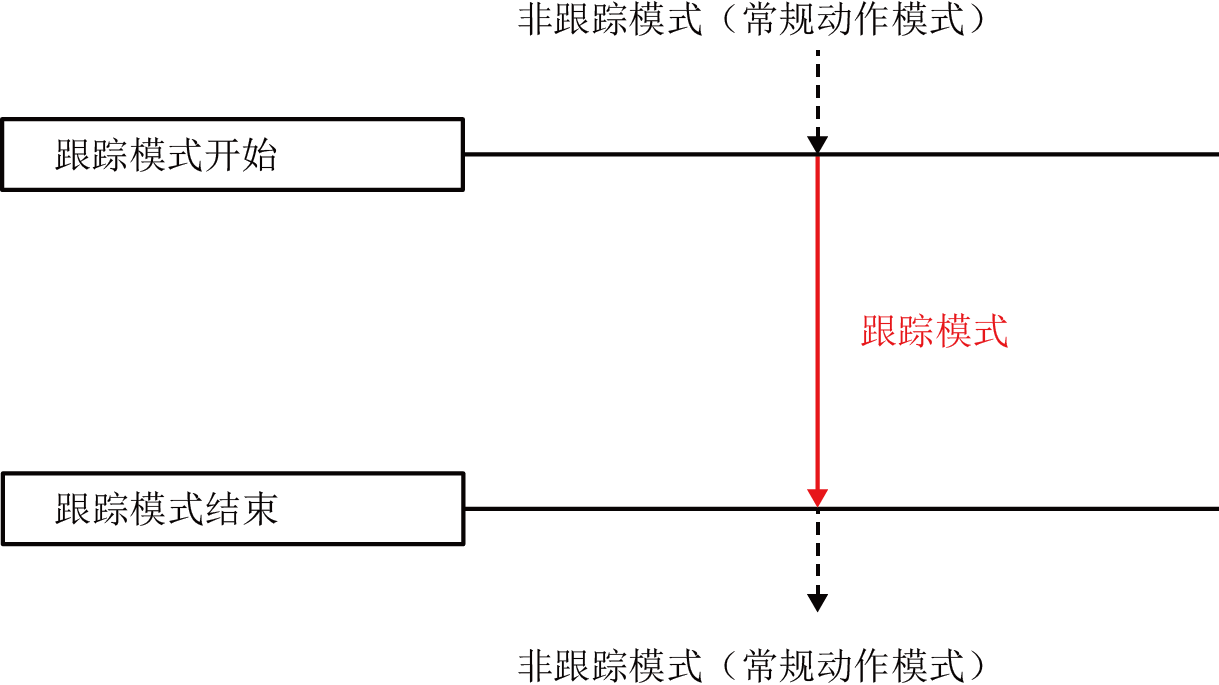
以下定义指示传送带跟踪功能处于有效还是无效状态的单词。
- 跟踪模式
- 是指传送带跟踪功能处于有效的状态。
处于该状态时,通过调用专用动作指令(“TrackApproach”、“TrackDepart”、“TrackMove”、“TrackDraw”),可使机器人相对因传送带移动而变化的目标位置而移动。
跟踪模式的切换使用专用的指令(“TrackStart”、“TrackStop”)。
跟踪模式中的机器人动作
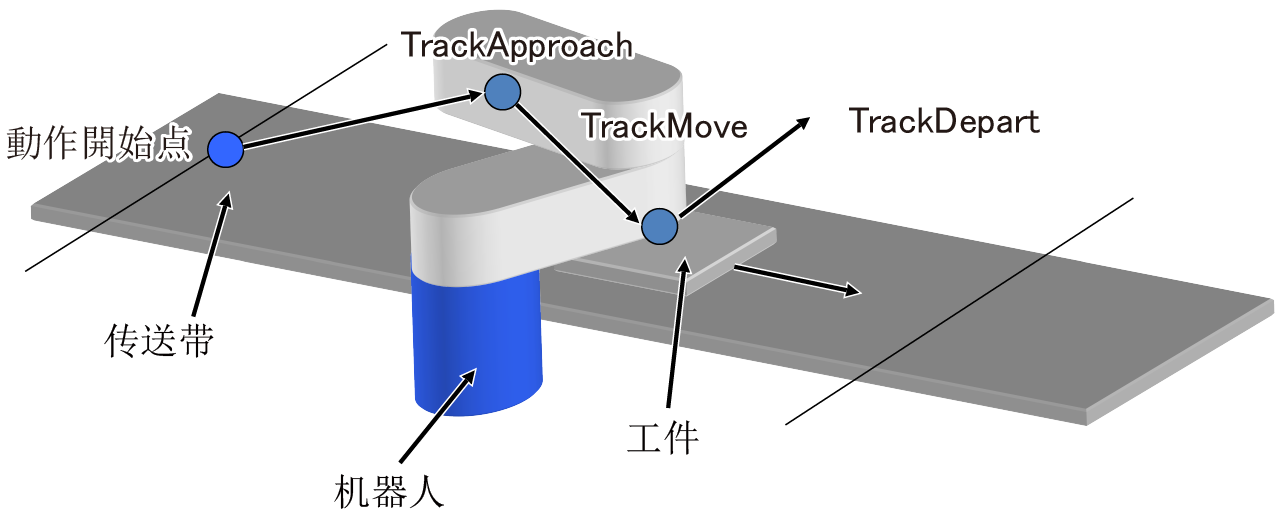
跟踪模式中使用专用的动作指令(“TrackApproach”、“TrackDepart”、“TrackMove”、“TrackDraw”),下达动作指示。
请注意,在跟踪模式中即使只执行了一次上述的专用动作指令,之后不进行任何操作,机器人也会为维持与传送带等速状态而持续地朝传送带方向自动移动。
以下定义表示跟踪模式中的机器人动作状态的单词。
- 传送带追踪动作(追踪动作)
- 指示机器人追上传送带上工件的动作。
机器人在与传送带上的工件等速前加速,追上工件后与传送带并行移动。
- 作业动作
- 指示与追踪传送带的动作(追踪动作)同时进行的机器人作业动作。
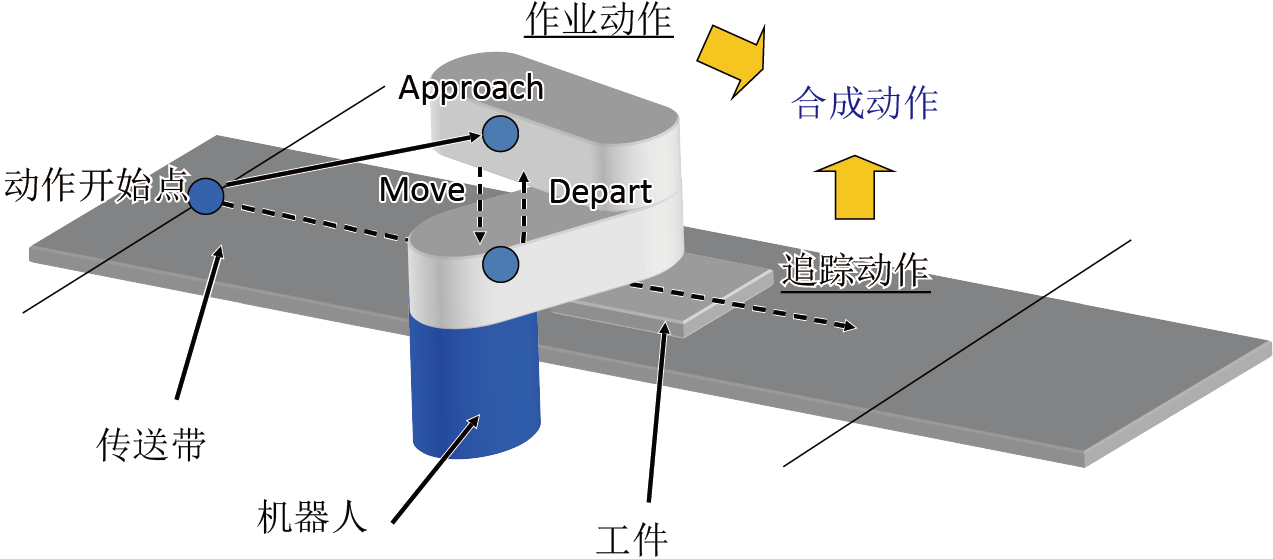
跟踪模式中的机器人动作是“传送带追踪动作”与“作业动作”的合成动作。
例如,“TrackApproach”动作是传送带追踪动作与作业动作“Approach”动作的合成动作。
传送带追踪动作的范围
请注意,在跟踪模式中即使只执行了一次专用动作指令(“TrackApproach”、“TrackDepart”、“TrackMove”、“TrackDraw”)之后不进行任何操作,机器人也会为维持与传送带等速的状态而持续地朝传送带方向自动移动。
在RC8系列的传送带跟踪中,为了明确机器人追踪传送带的范围,设置了相对传送带上的区域的以下概念。
- 跟踪范围
- 机器人可执行传送带追踪动作的传送带上的范围。
受工件传来侧(上流)的上游上限和传走侧(下流)的下游下限的限制。
使用多台机器人时,设定各机器人的跟踪范围。
- 跟踪范围上游上限(上游上限)
- 这是机器人可开始传送带追踪动作的上流侧位置。
必须为机械人手臂可到达的位置。
- 跟踪范围下游下限(下游下限)
- 机器人停止传送带追踪动作,开始减速的下流侧位置。
必须为机械人手臂可到达的位置。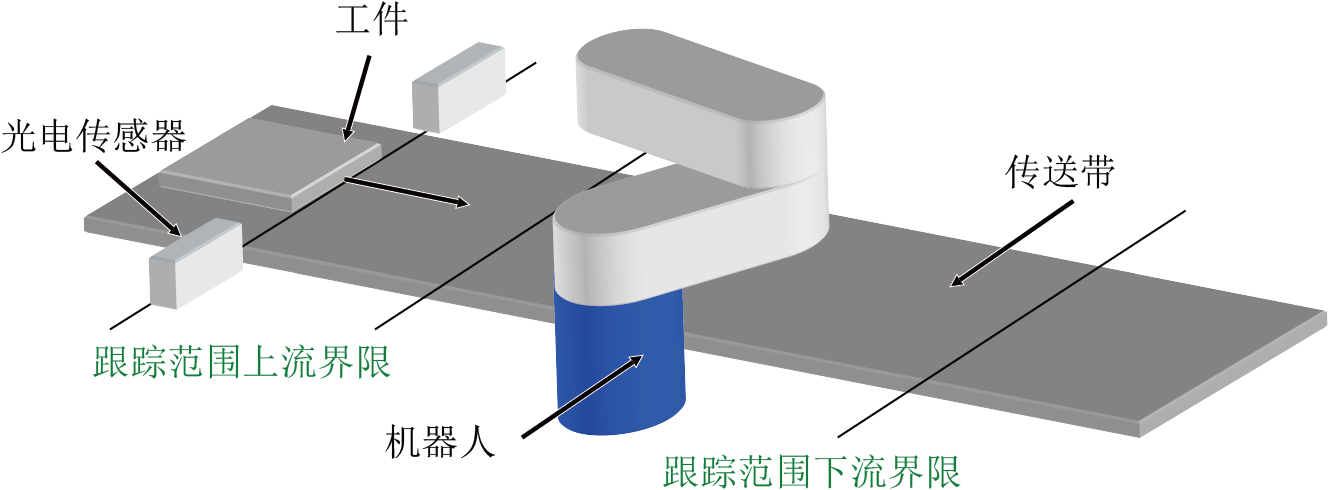
用多台机器人进行传送带跟踪
RC8系列可针对1台传送带,使用多台机器人进行传送带跟踪。
在传送带的上流和下流分割作业区域,想分别用不同的机器人作业时等,使用这种方式。

使用多台机器人进行传送带跟踪时,为每个机器人控制器分配以下的2个职责。
- 主局控制器
- 接收传感器、视觉传感器检出工件时的信号,读取工件的位置信息的控制器。
在多个控制器中,只为1台分配职责。在自身进行传送带跟踪的同时,还具有指示其他控制器跟踪哪个工件的职责。 - 子局控制器
- 主局控制器以外的控制器全部承担这一职责。
从主局控制器接收以太网通信中作为跟踪对象的工件的数据,进行传送带跟踪。
ID : 5324