
ID : 186
Depart
功能
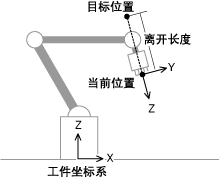
从当前位置向工具坐标-Z方向移动。
格式
Depart 动作插补, 离开长度[, 动作选项]
指定项目
解说
从当前位置向工具坐标-Z方向移动。
执行该语句时,任务必须获取机器人轴的控制权。
计算目标位置
可按照以下方法计算目标位置。
TargetPos = DevH(DestPos, P(0, 0, -Length))'确认目标位置是否在可动领域后再动作的示例
If OutRange(DevH(DestPos, P(0, 0, -Length))) = 0 Then
Depart P, Length
End If相关项目
注意事项
-
应用示例
'!TITLE“工具坐标系指定的相对动作”
'按照工具坐标系指定的值向-Z轴方向移动
Sub Sample_Depart
Dim aaa As Single
Dim bbb As Single
TakeArm Keep = 1
'从当前位置向距离70mm的位置移动
Depart P, 70
aaa = 20
bbb = 40
'从当前位置向距离aaa(20mm)的位置移动
Depart L, aaa, Speed = 90
'从当前位置向距离bbb(40mm)的位置移动
Depart L, bbb, S = 80
End SubID : 186