
ID : 6967
实施步骤
通过WINCAPSIII创建模型时的步骤。
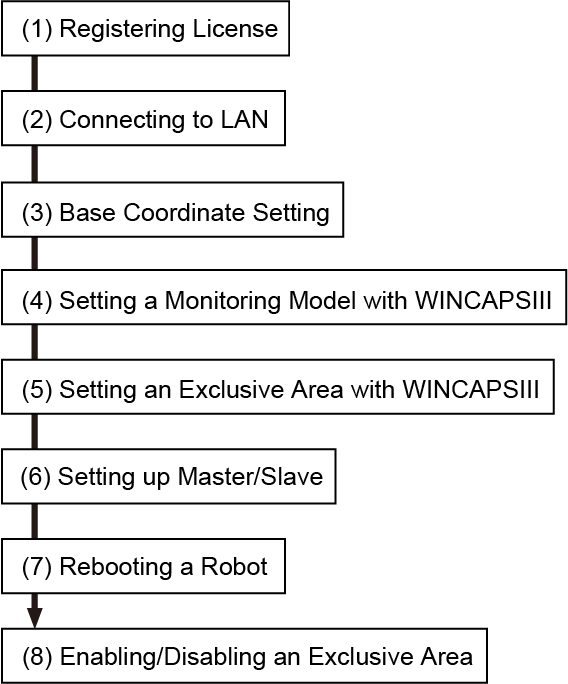
(1) 许可证登录
由于排他控制功能是选项功能,需要将许可登录到各机器人。
使用远程TP/虚拟TP进行注册。
关于许可证的输入方法,请参照“注册许可证”。
(2) 连接到LAN
用各机器人设定IP地址。详情请参照TP应用操作指南中的“通信设定画面的显示、变更”。
(3) 基础坐标的设定
由于通过世界坐标系设定排除区域,因此通过WINCAPSIII进行基础定义。
(4) 用WINCAPSIII设定监视模型
利用WINCAPSIII的臂建模功能设定监视模式。
(5)用WINCAPSIII设定排除区域
利用WINCAPSIII的机械臂建模功能创建排他区域,与监视模型数据一起发送到机器人。
(6)主局/子局的设定
用各机器人设定主局/子局。设定主局机器人时,进而进行通信设定。
(7) 重启机器人
重启主局机器人与各子局机器人后,排他控制自动启动。
由于机器人相互进行通信检查,主局与子局同时启动。
(8)排他区域的有效/无效
可以通过WINCAPSIII、远程TP/虚拟TP及指令之一切换为有效/无效。
ID : 6967