
ID : 6969
WINCAPSIII中的监视模型设定
利用WINCAPSIII的臂建模功能创建监视模型。
需要用主局机器人以及各子局机器人进行创建。
关于向COBOTTA发送监视模型数据,将在下一步“WINCAPSIII中的排他区域设定”中与排他区域一起进行。
登录等级为程序员。
监视模型创建时的制约
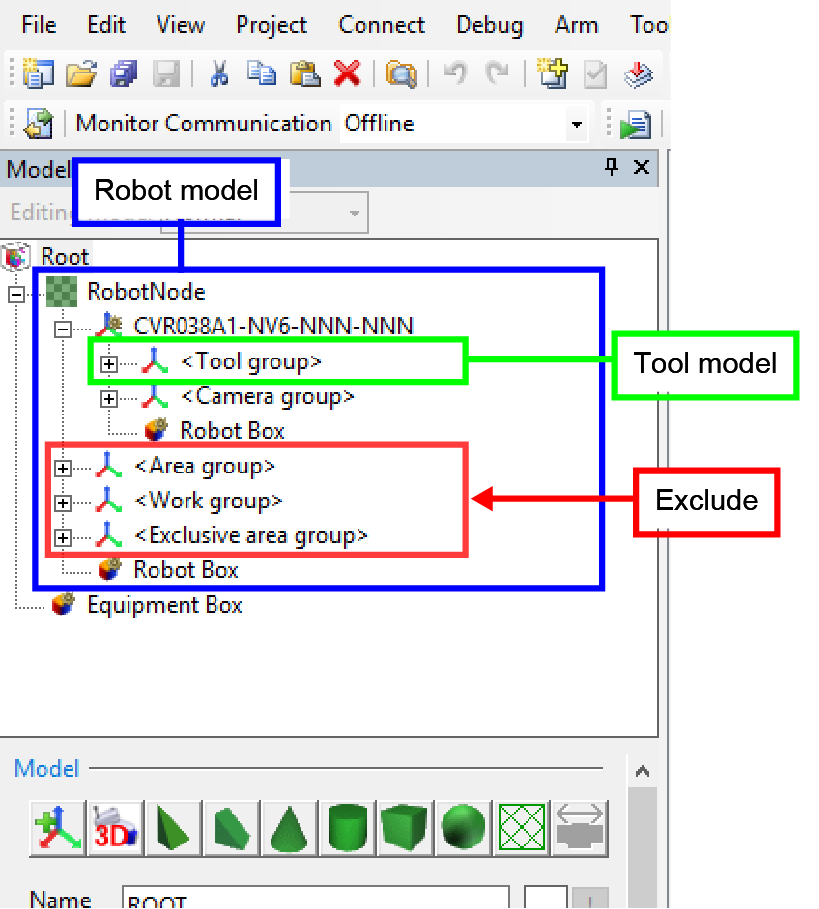
请在指定的层级创建各监视模型。
创建项目时,通过[控制器选件的选择]将夹治具设为[电动夹钳]时,在工具组中将相机设为[Canon]后,相机组中会自动创建项目。
| 监视模型名 | 制约 | 详细 |
|---|---|---|
| 机器人模型 | 在Robot Node以下,除工具组、区域组、工件组、排他组以下的对象。 | - |
| 工具模型 | 工具组以下的对象。 | 工具编号以下的工具模型在工具编号变更后有效。 工具组正下方的工具模型是常时监视对象。 |
监视模型的创建步骤
由于机器人监视模型被自动创建,用户只创建工具监视模型。
1
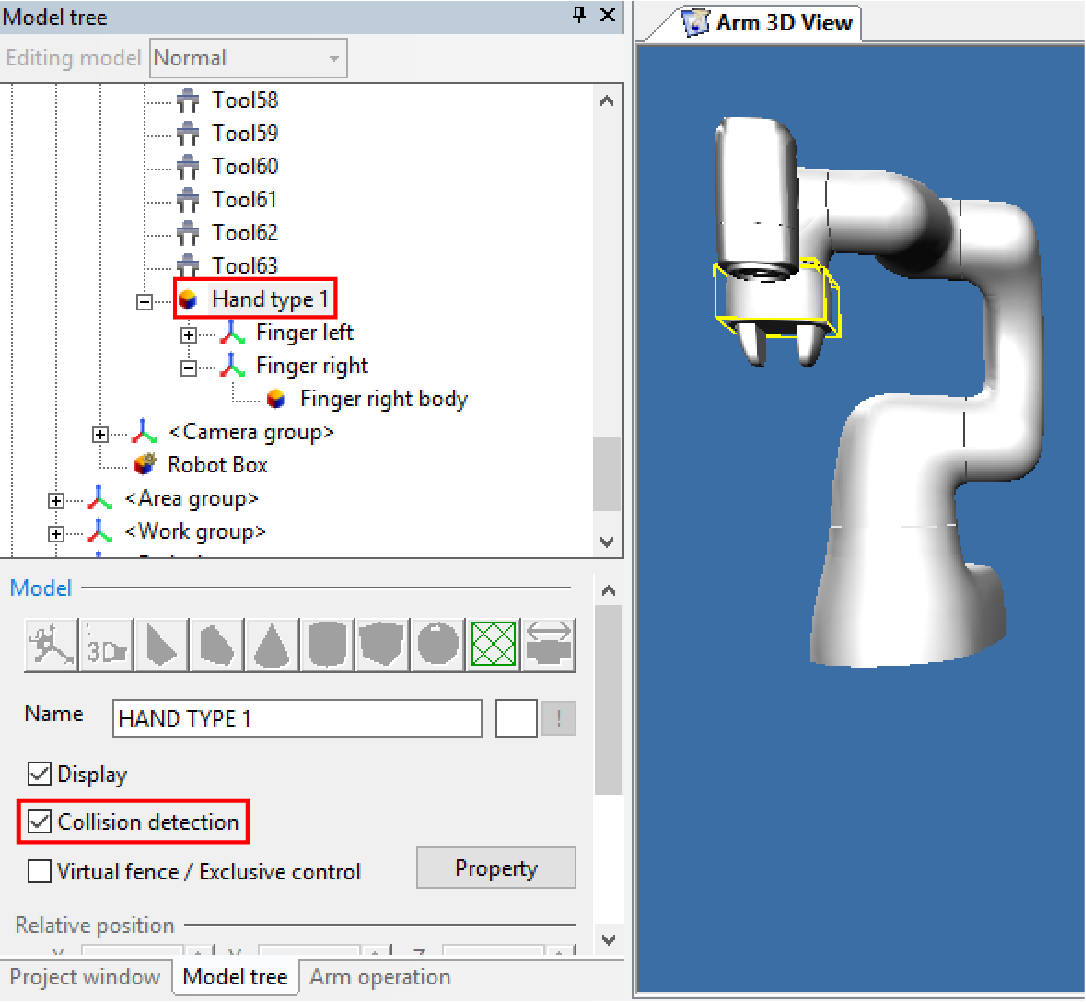
利用WINCAPSIII的臂建模功能创建模型。
2
选择对象,将[干涉检查]设为有效。
3
从[详细设定]打开[模型详细设定],将[虚拟栅栏/排他控制]设为有效。
如果将[检测范围显示]设为有效,则显示监视模型。
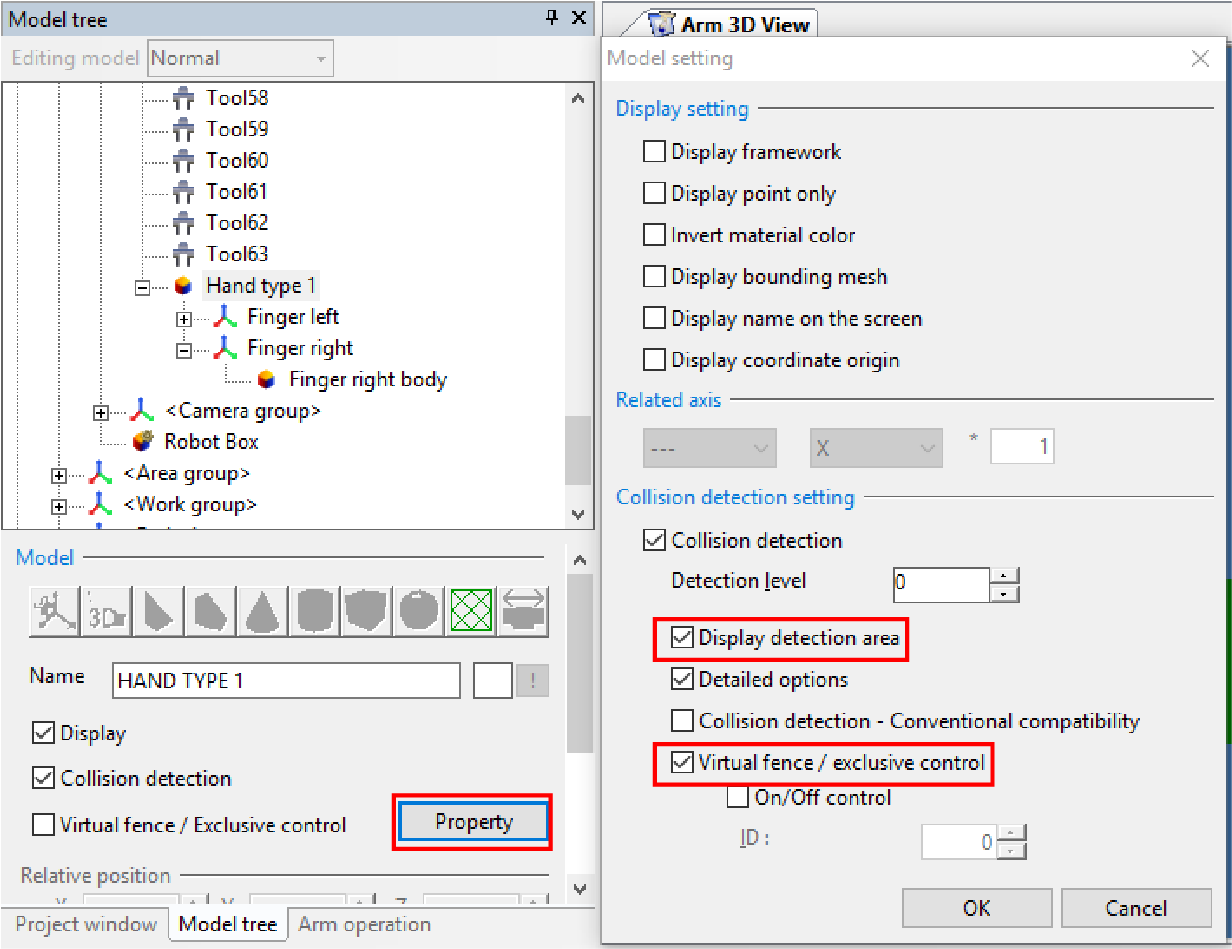
机器人始终处于涉检查有效的状态。
4
设定检测等级。
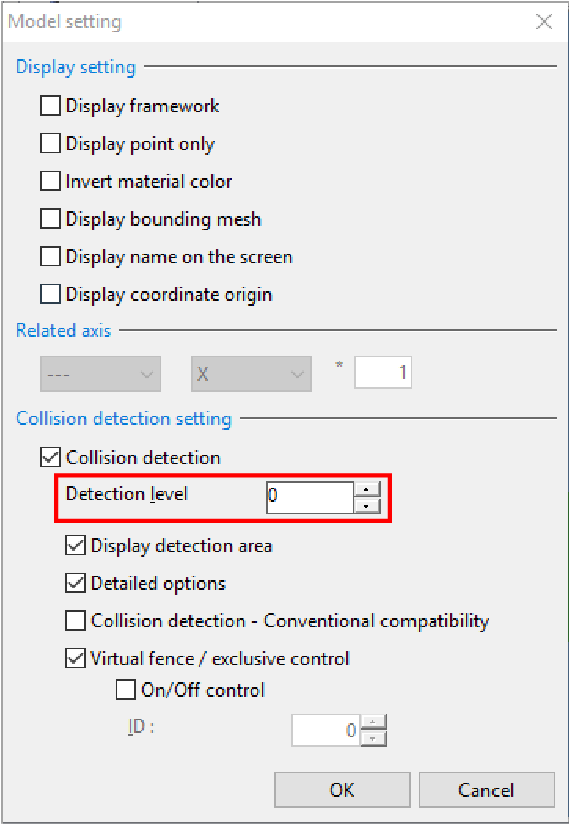
如果提高等级,精度更好,能够更加细致地监视,但如果太高,测量时间变长,可能发生测量时间延迟错误。
5
对于想监视的全部模型,重复进行STEP2至STEP4。
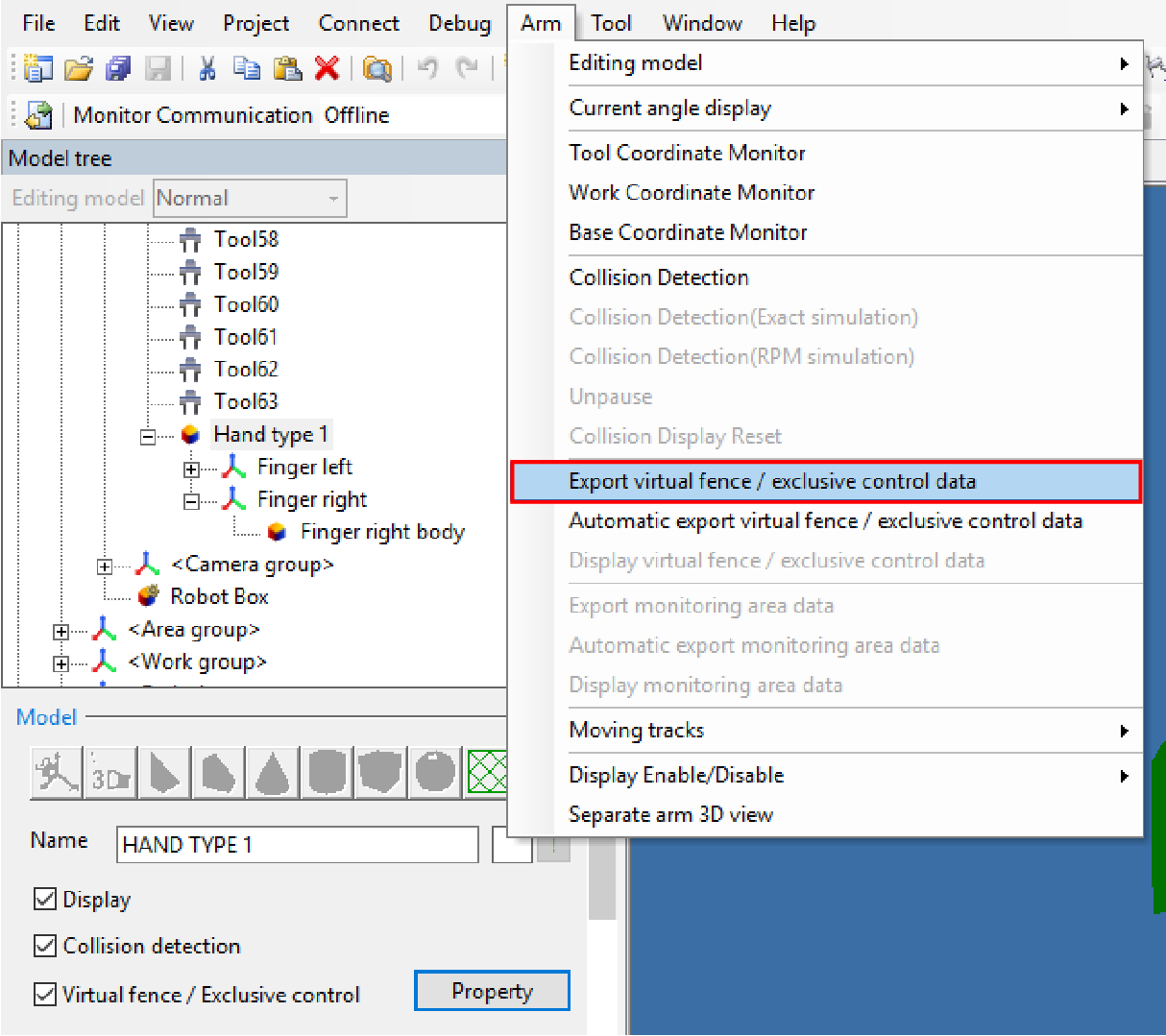
6
将排他控制的数据转换为可用COBOTTA处理的数据后保存。
菜单[机械臂]-[虚拟栅栏/排他控制数据输出]
想确认输出的排他控制数据时,可通过菜单[机械臂]-[虚拟栅栏/排他控制数据显示]确认。
7
监视模型的数据与排他区域数据一起发送,但是用远程TP/虚拟TP或程序创建排他区域数据时,在此向COBOTTA发送监视模型数据。
发送详细内容请参照“WINCAPSIII中的排他区域设定”。
ID : 6969