
ID : 6966
功能说明
在控制功能中,已有其他机器人进入机器人试图进入的排他区域时,通过减速或者停止,禁止多个机器人进入排他区域。
用主局机器人管理信息,各机器人根据该信息控制各机器人。
- 当排除区域与机器人的动作开始位置太靠近或者动作速度太快时,监视时机不合,可能进入排除区域内,因错误而停止。
- 机器人轴和行走轴都设成相同机械臂组。
- 对于电流限制功能和b-CAP子局,由于停止预测位置不能正确求得,通过排他控制停止时,可能发生[0x83201563 : 排他区域当前值侵入检测]的错误。
- 排他控制处于待机状态时,即使看起来是停止的,也可能在之后一下子动起来,因此通过取得机器人状态的指令(MotionComplete等)、I/O返回“机器人动作中”状态。
监视对象
可将以下项目设为监视对象。
- 机器人、工具
- 机器人和排除区域
- 工具和排除区域
- 目标位置
可在参数中设定。
始终监视当前值以及指令位置。
排除区域
排他区域的形状为直方体。最多可设定32个。
在世界坐标系中设定排除区域。此外,可以通过WINCAPSIII、远程TP/虚拟TP及指令切换监视的有效/无效。
要将世界坐标系设为有效,需要用各COBOTTA进行基础设定。
关于排除区域的颜色显示
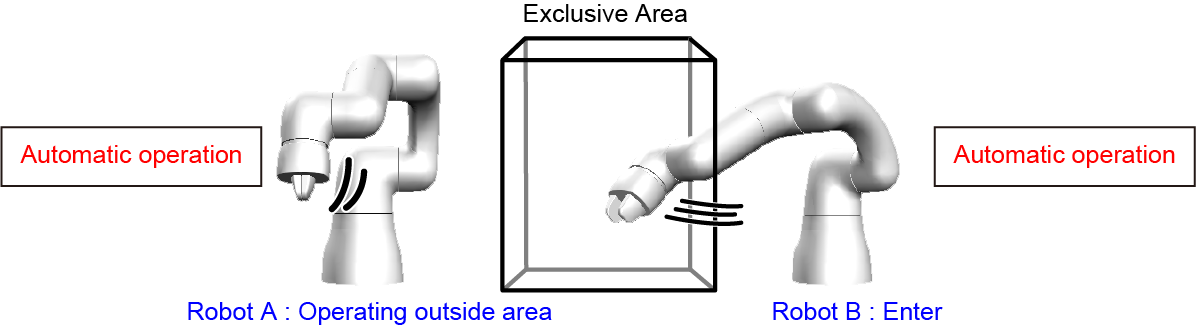
在3D图像上通常以“水色”显色排他区域,待机状态变为“黄色”,进入排他区域时变为“紫色”。
在进入排除区域的状态开始/变更
在机器人监视模型或者工具监视模型进入排他区域的状态,如下所述开始或者变更了监视时,发生[0x84201563:排他区域当前值侵入检测]的错误。
- 重启机器人
- 将排他区域从无效变更为有效
- 变更排他区域的定义
监视有效/无效
监视有效
以下情况下COBOTTA监视有效。
- 执行Move和Approach等动作系列指令(自动运行)时
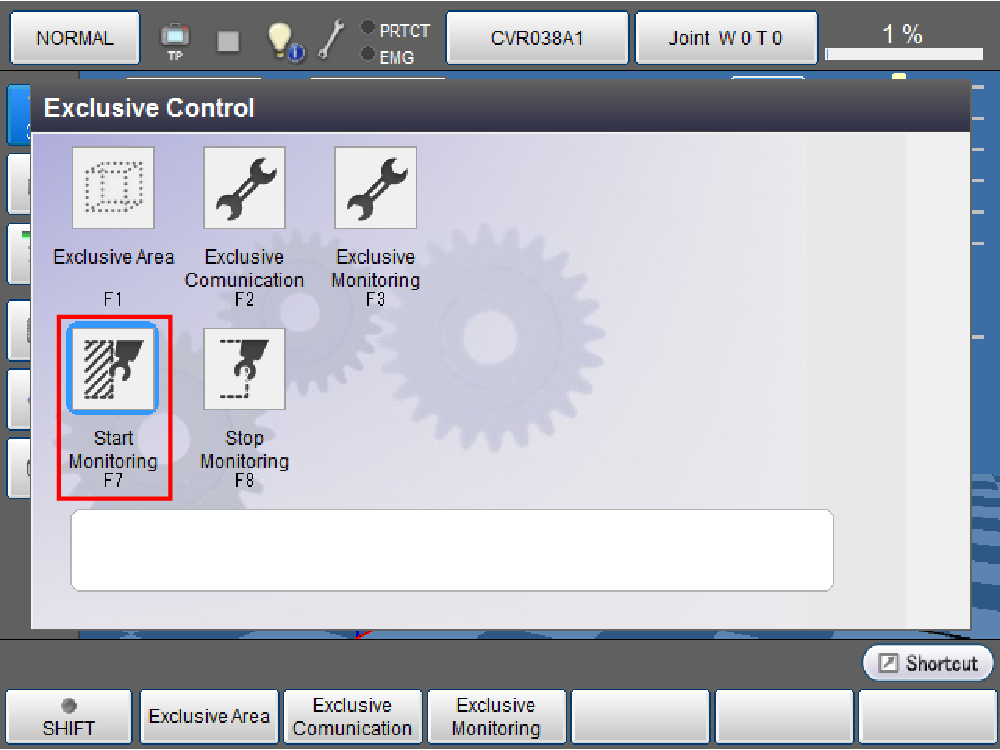
- 在远程TP/虚拟TP的排他控制画面上按下[F7 监视开始]时
监视无效
以下情况下COBOTTA监视无效。
- 通过操作键运行(手动操作)COBOTTA时
- 在变量画面上移动变量时
- 长按机械臂上的功能键切换到直接模式时
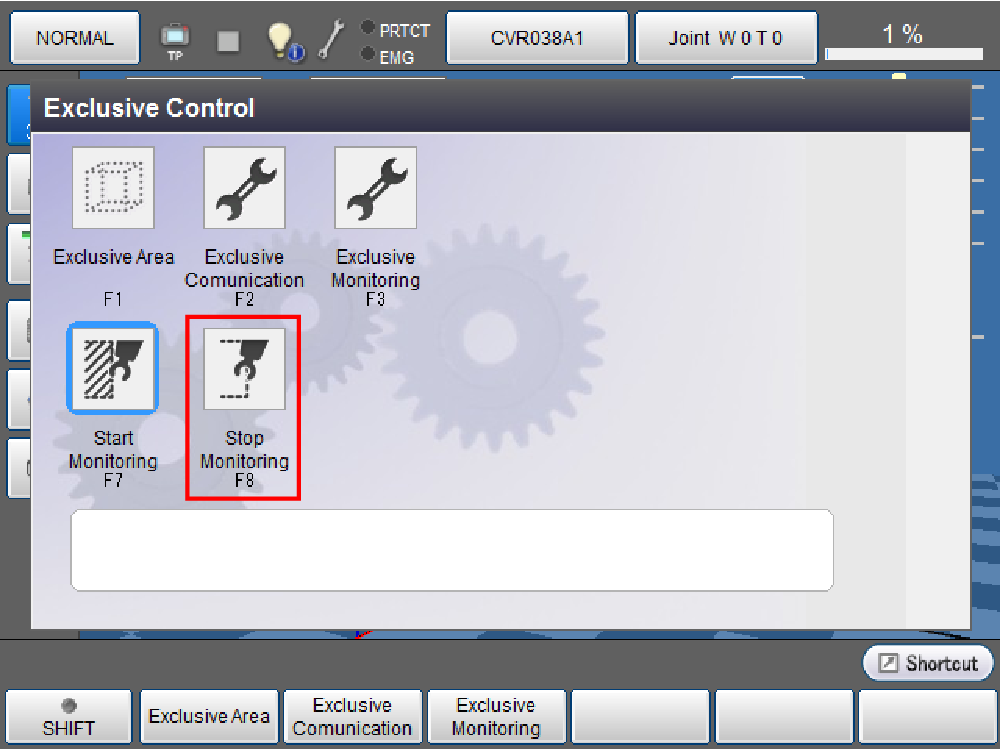
- 在远程TP/虚拟TP的排他控制画面上按下[F8 监视结束]时
即便监视无效,机器人状态为待机状态时,经过一定时间后会因待机超时发生错误。这种情况下通过手动操作使进入排他区域的机器人退避后,在远程TP/虚拟TP的排他控制画面按下[F7 监视开始]后将监视设为有效。可清除机器人进入排他区域的信息。
切换到下述状态时,保持切换前的状态。
- 将排他区域设为无效时
- 将监视设为无效时
例如,即便在进入排他区域的状态下降监视切换为无效,也会保持进入区域的状态。
应该注意的动作示例
请注意,如下例所示,在通过手动操作退避到区域外时,待机中的其他机器人可能擅自动起来。
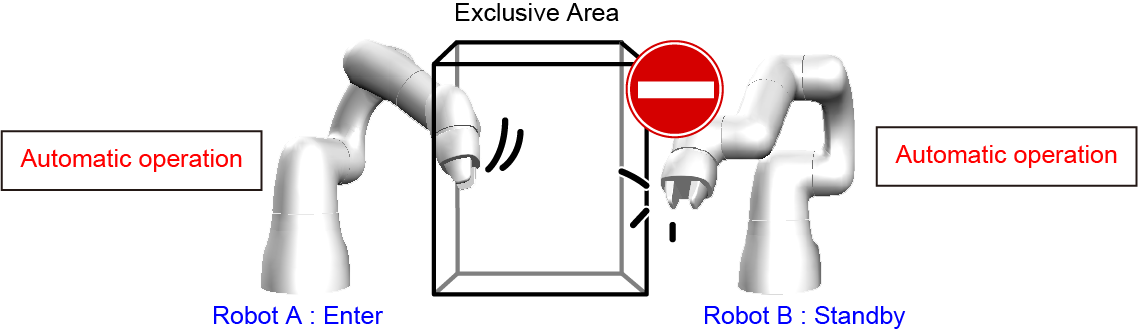
1
机器人A进入,机器人B待机的状态。
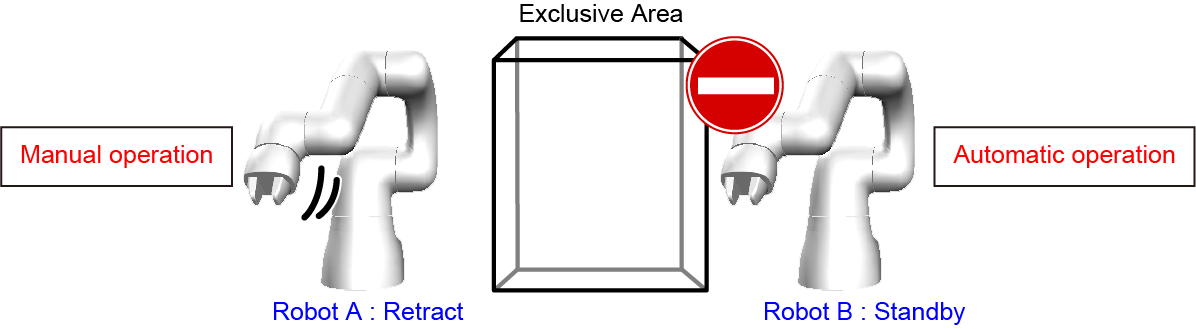
2
通过手动操作将机器人A退避到区域外。此时,机器人A保持切换前的(进入区域内的)状态,因此机器人B继续待机。
3
将机器人A设为自动运行状态。此时,机器人A切换到位于区域外的状态,因此机器人B开始进入。
排除区域重叠时的注意事项
当排除区域重叠时,机器人彼此进入待机状态,不再运动。
另外,排除区域靠近时也可能不再运动。
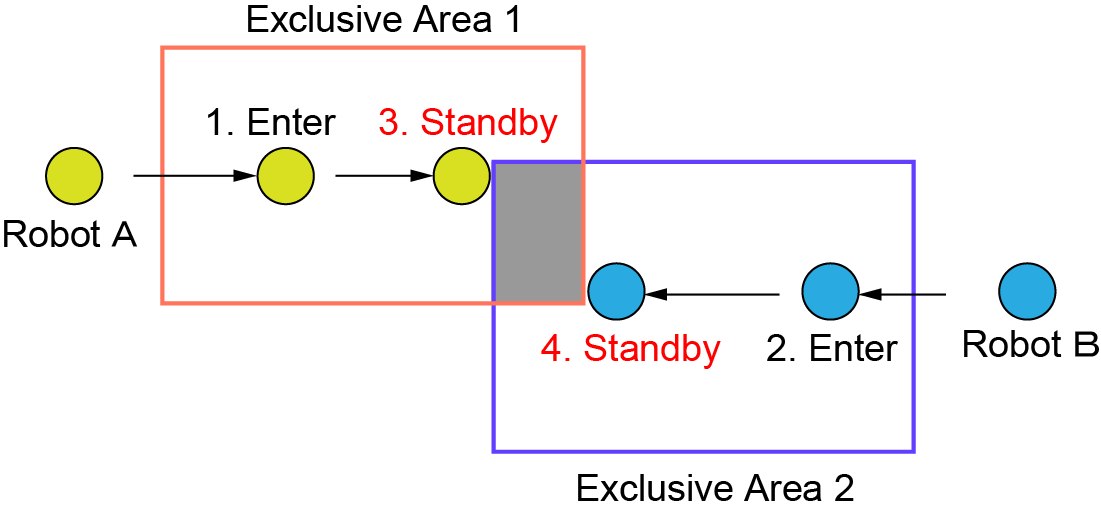
不再运动的例子
- 机器人A进入排他区域1。
- 机器人B进入排他区域2。
- 机器人A试图进入排他区域2,但由于机器人B已进入,机器人A待机。
- 机器人B试图进入排他区域1,但由于机器人A已进入,机器人B待机。
发生待机超时时的解除方法
通过手动操作使进入排他区域的机器人退避到区域外,切换到自动运行状态,机器人进入排他区域的信息将被清空。请将随后想移动的机器人设为自动运行模式。
- 因待机超时发生错误而停止的机器人只能通过手动操作动作。
- 仅仅移动因待机超时发生错误而停止的机器人,不能开始动作。
- 即使将因待机超时发生错误而停止的机器人切换到别的程序,也不能直接开始动作。
- 因待机超时发生错误的状态下,待机时间持续一定时间后,会再次因待机超时发生错误。因监视有效更新机器人的状态,请在退避自动运行或在远程TP/虚拟TP的排他控制画面上按下[F7 监视开始]。
发生0x84201563“排他区域当前值进入检测”时
如果执行短时间内进入排他区域,掠过要退避排他区域的动作,可能会发生本错误。
可以通过以下对策减轻错误的发生。但是,如果并用排他控制功能和电流限制功能、b-CAP子局,由于无法正确求出停止预测位置,因此通过本对策可能无法避免错误。
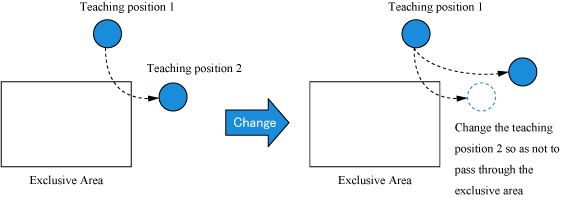
对策1
修正示教位置及动作路径,以避免进行掠过排他区域的动作或短时间进入或退避动作。
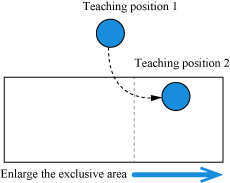
对策2
变更排他区域的大小。
扩大时
扩大排他区域,以确保将待机时等示教位置也涵盖在排他区域内。
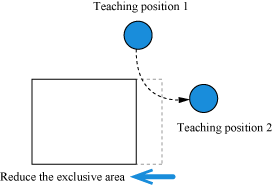
缩小时
缩小排他区域,以确保大小在机器人动作时不会掠过排他区域。
ID : 6966