
ID : 5933
SyncMove选项(协调功能选项)
功能
协调功能使用的选项。如果安装该选项,根据前导机器人的动作,跟踪机器人自动进行动作。
可在下述动作指令中使用。
Approach、Depart、Draw、Move、Rotate、RotateH
该选项对Ver.1.9.*或更高版本有效。
格式
[Robot*.]动作指令 , SyncMove = (跟踪机器人编号[,跟踪机器人编号[,跟踪机器人编号]])但是,跟踪机器人为1台时可省略括弧。
[Robot*.]动作指令 , SyncMove = 跟踪机器人编号
指定项目
- 动作指令
记述动作指令。关于各动作指令的记述,请参照各指令的手册。
例
Robot0.Move L, P0, SyncMove = Robot1但是无法进行“目标位置的连续记述”。也无法指定动作插补方法的PTP。
例
无法使用下述P[5]。Robot0.Move L, P[2], P[5], Speed = 30, Next, SyncMove = Robot1无法使用下述的P。
Robot0.Move P, P[2], Speed = 30, Next, SyncMove = Robot- 跟踪机器人编号
- 以Robot1、Robot2的形式记述跟踪机器人。
或Robot0.Move L, P0, SyncMove = ( Robot1 )
Robot0.Move L, P0, SyncMove = ( Robot1,Robot2 )
Robot0.Move L, P0, SyncMove = Robot1'跟踪机器人为1台时,括号可省略 Robot0.Move L, P0, SyncMove = ( Robot1,Robot2 )
解说
维持动作开始时的前导和跟踪的前端的相对位置的同时,根据前导的动作进行跟踪动作。将此类动作称为“协调动作”。不指示跟踪位置时,可对搬运动作进行简单记述,以使动作自动与前导的动作一致。
进行该工作前,请预先设定前导和跟踪的基础坐标。如果前导和跟踪的位置关系有偏差,则无法正确动作。
为执行带该选项的指令,必须获取指定的各机器人轴的控制权。
相关事项
SyncTime注意事项
- 不支持ArchMove。
- 通常的动作指令和协调的动作指令,无法通过路径连接。
无法指定Move P, @P P0 '@p。在下一行执行时发生错误 Robot0.Move L, P0, SyncMove = Robot1 -
用通过动作(此处包括位置指定的通过动作)连接协调动作时,注意事项如下。
不可使3台以上的机器人进行通过动作。 使2台机器人进行通过动作时,机器人组合需要一致。 可动作模式和不可动作模式的例子如下图所示。
可进行动作 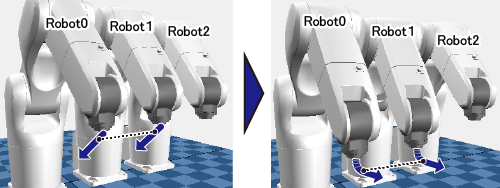
以通过动作连接Robot0和Robot1的动作(要通过动作的机器人组合一致时)。
'程序例 Robot0.Move L, @P P1, SyncMove = (Robot1), Next Robot0.Move L, P2, SyncMove = (Robot1)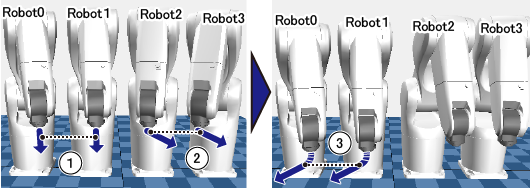
用NEXT选项执行Robot0和Robot1组合中的动作,以及Robot2和Robot3组合中的动作后,以通过动作连接Robot0和Robot1的动作(要通过动作的机器人组合一致时)。
'程序例 Robot0.Move L, @P P1, SyncMove = (Robot1), Next Robot2.Move L, P11, SyncMove = (Robot3), Next Robot0.Move L, P2, SyncMove = (Robot1)此时,在第2个动作中包含第1个动作的机器人(Robot0和Robot1)很重要。第2个动作含有Robot0或Robot1中的某一个时,就会以通过动作与第1个动作连接。这样,由于机器人的组合不一致,因此无法使机器人动作。
不可进行动作 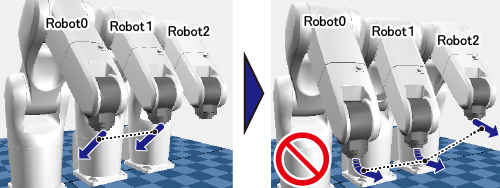
以通过动作连接Robot0和Robot1的动作、以及Robot0和Robot1及Robot2的动(要通过动作的机器人为3台以上,且组合不一致时)。
'程序例 Robot0.Move L, @P P1, SyncMove = (Robot1), Next Robot0.Move L, P2, SyncMove = (Robot1,Robot2)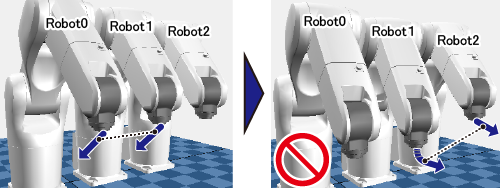
以通过动作连接Robot0和Robot1的动作、以及Robot1和Robot2的动(要通过动作的机器人组合不一致时)。
'程序例 Robot0.Move L, @P P1, SyncMove = (Robot1), Next Robot1.Move L, P2, SyncMove = (Robot2) - 符合以下任一条件时,如果执行某个特定动作,有时多个机器人的动作开始时间会发生偏差。
只使用Ehernet作为机器人控制器之间的通信方法时。 未将协调控制同步选项设定成“提高同步精度”时(协调控制同步选项的初始值为“提高同步精度”)。 机器人控制器的软件版本比2.5.*早时。 特定动作是指按以下顺序执行同步动作(使用SycnTime指令的动作)或协调动作时的动作。
1. 在通过起始位移中指定@E以外,且执行同步动作或协调动作这两动作之外的动作 2. 执行同步动作或协调动作 在上述情形中,抑制动作开始时间偏差时,请按以下任一内容变更同步动作或协调动作之前的动作指令。
将之前指令的通过起始位移指定为@E。 将之前指令的通过起始位移指定成@0,在同步动作或协调动作之间插入Delay指令进行调整。 例1
Move P, @0 P0 '将SyncMove之前的动作的通过起始位移指定为@0或@E 为Delay( 30 ) '@0时,在与SyncMove之间插入Delay指令。@为E时不需要Delay Robot0.Move L, P1, SyncMove = Robot1例2
'SyncMove之前的动作指令为SyncTime,SyncMove时,不需要Delay Robot0.Move L, P2, SyncMove = Robot1 Robot0.Move L, P3, SyncMove = Robot1
关于协调控制同步选项
- 软件版本为2.5.*之前的机器人控制器中没有协调控制同步选项。
- 在软件版本为2.5.*或更高的机器人控制器中使用软件版本低于2.5.*的机器人控制器数据(项目)时,协调控制同步选项为“标准”。
- 如果变更协调控制同步选项的设定,机器人程序的循环时间可能会能改变。
-
设定/确认协调控制同步选项时,首先设成“维护”后,然后按以下操作路径操作多功能教导器。
操作路径 : [F6 设定]-[F9 协调] 打开[协调设定]窗口,设定/确认No.76的“协调控制同步选项”。
应用示例
Robot0.TakeArm '获取机器人0的控制权
Robot1.TakeArm '获取机器人1的控制权
Robot0.Move L, P0, SyncMove=Robot1ID : 5933