
ID : 209
Rotate
功能
沿指定轴周围做旋转动作。
格式
Rotate 基准旋转面, 旋转角[, 旋转中心坐标][, pose = 旋转选项][, static = 旋转方向固定选项][, 动作选项]
指定项目
- 基准旋转面
- 相对于实际动作时通过的平面,指定作为基准的平面。"使用“XY”、“YZ”、“ZX”、“XYH”、“YZH”、“ZXH”、“(矢量型、 矢量型、 矢量型)”中的任意一个进行指定。”请参照“指定基准旋转面”。
- 旋转角
- 使用单精度实数型数据指定旋转角度(Deg)。旋转角中可附加目标位置选项。旋转方向由接近矢量与实际旋转面的关系决定。"请参照旋转方向”。
- 旋转中心坐标
- 通过矢量型数据指定旋转中心坐标。以垂直于实际旋转面,通过该坐标的轴为旋转中心轴。
根据基准旋转面的指定方法,有时可省略。"请参照“指定旋转中心坐标”。 - 旋转选项
- 使用“pose = 1”或者“pose = 2”指定。请参照旋转选项”。
可省略。省略时为“pose = 2”。指定了1,2以外的值时,与省略时的动作相同。 - 旋转方向固定选项
- 指定“static = [无效]”或者“static = [有效]”。
有效/无效用整数型数据指定。
[有效]:True或者0以外
[无效]:False或者0
如果设为“static = [有效]”,则无论趋近矢量的方向如何,旋转中心轴的方向都是固定的,旋转方向变成固定。
可省略。省略时为“static = [无效]”。
本选项仅在基准旋转面指定为“XY”、“YZ”、“ZX”、任意倾斜平面(指定3点)时才有效。指定了“XYH”、“YZH”、“ZXH”时,变为按工具坐标系旋转,因此无论本选项如何指定,都变为右螺纹旋转。 - 动作选项
- 可指定动作选项。
解说
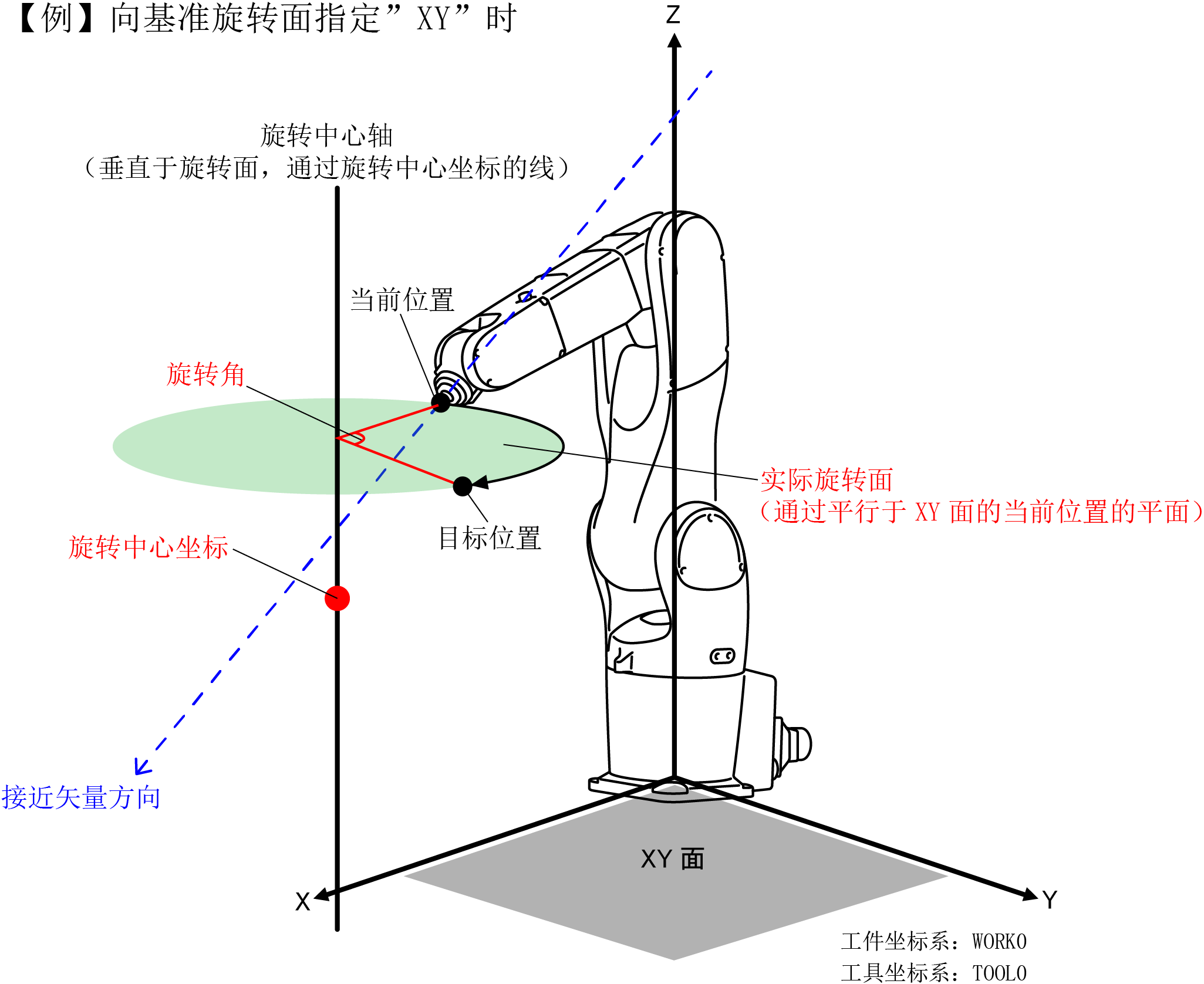
在平行于指定的基准旋转面、通过当前位置的平面(叫做实际旋转面)上,以指定的角度执行圆弧动作。此时的中心轴是垂直于实际旋转面、通过指定的旋转中心坐标的线。
另外,要执行该语句,任务必须获取机器人轴的控制权。
指定基准旋转面
指定基准旋转面有以下的方法。
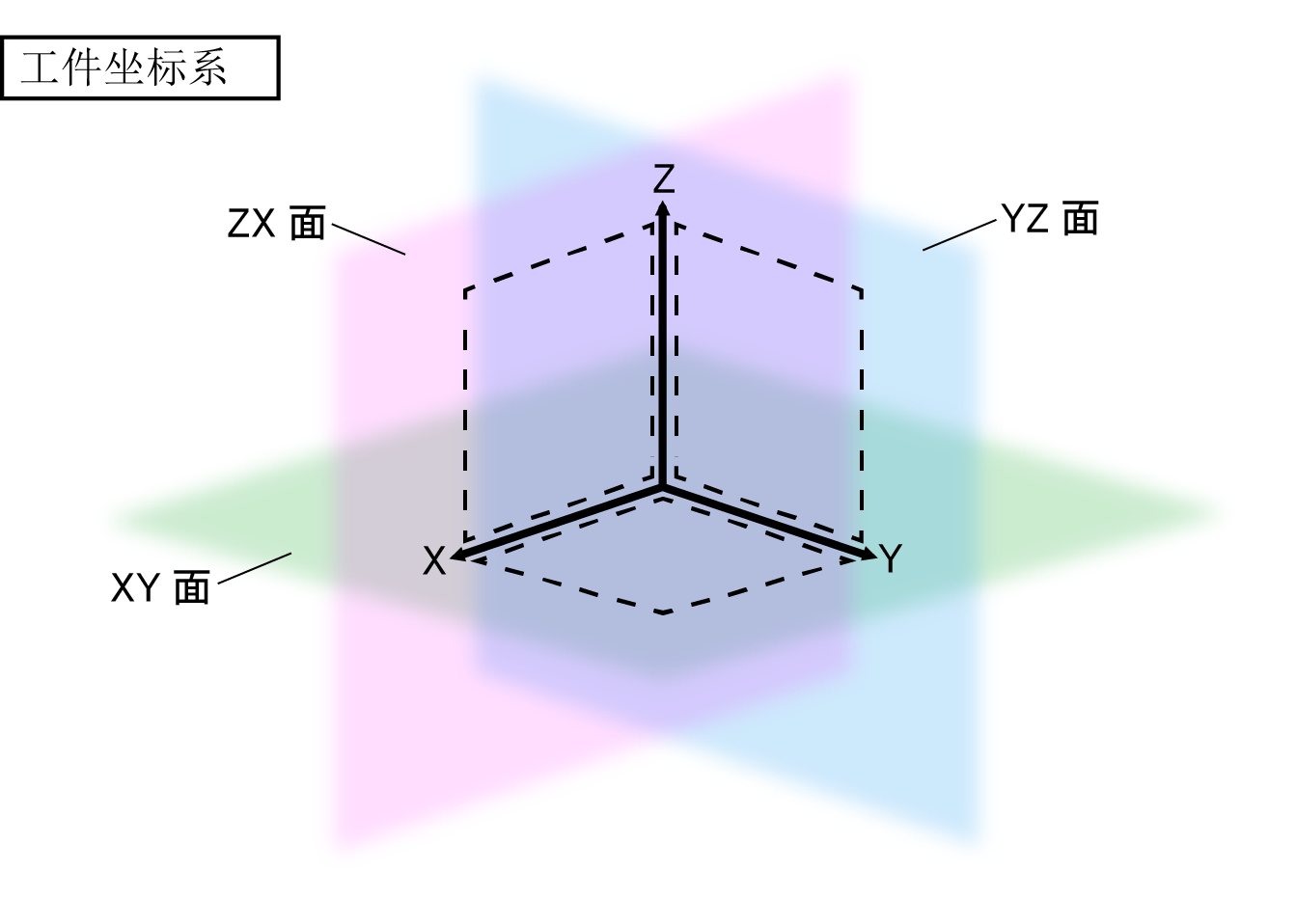
- 以当前的工件坐标系为基础的平面:“XY”、“YZ”、“ZX”
- 在当前的工件坐标系的X、Y、Z轴内,平行于2个轴创建的平面、通过当前位置的平面为实际旋转面。"XY”表示XY平面,“YZ”表示YZ平面,“ZX”表示ZX平面。
可以省略旋转中心坐标。省略时代入工件坐标原点(0,0,0)。
指定了XY面的动作示例请查阅这里。
- 以当前的工具坐标系为基础的平面:“XYH”、“YZH”、“ZXH”
- 在当前的工具坐标系的X、Y、Z轴内,平行于2个轴创建的平面、通过当前位置的平面为实际旋转面。"“XYH”表示XY平面,“YZH”表示YZ平面,“ZXH”表示ZX平面。
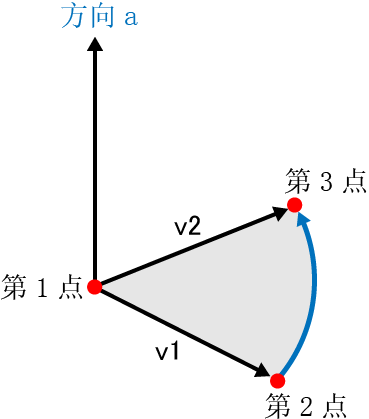
不能省略旋转中心坐标。 - 任意的倾斜平面:(矢量型、 矢量型、 矢量型)
- 在当前的工件坐标系中通过矢量型数据制定3个点,平行于通过这3点的平面、通过当前位置的平面为实际旋转面。
可以省略旋转中心坐标。省略时指定了基准旋转面的矢量型数据的第一个矢量值被代入。
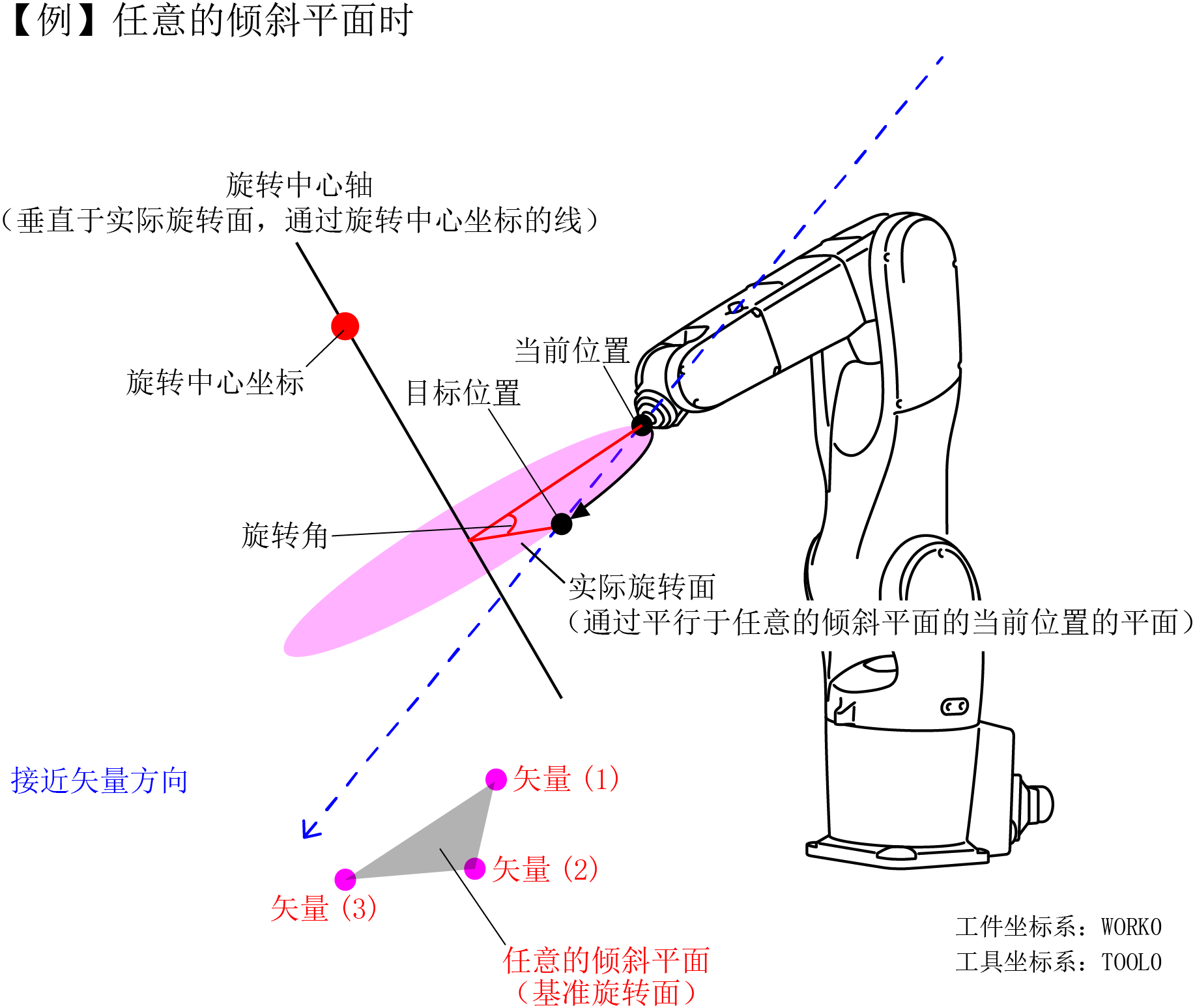
指定了任意倾斜的平面的动作示例请查阅这里。
旋转方向
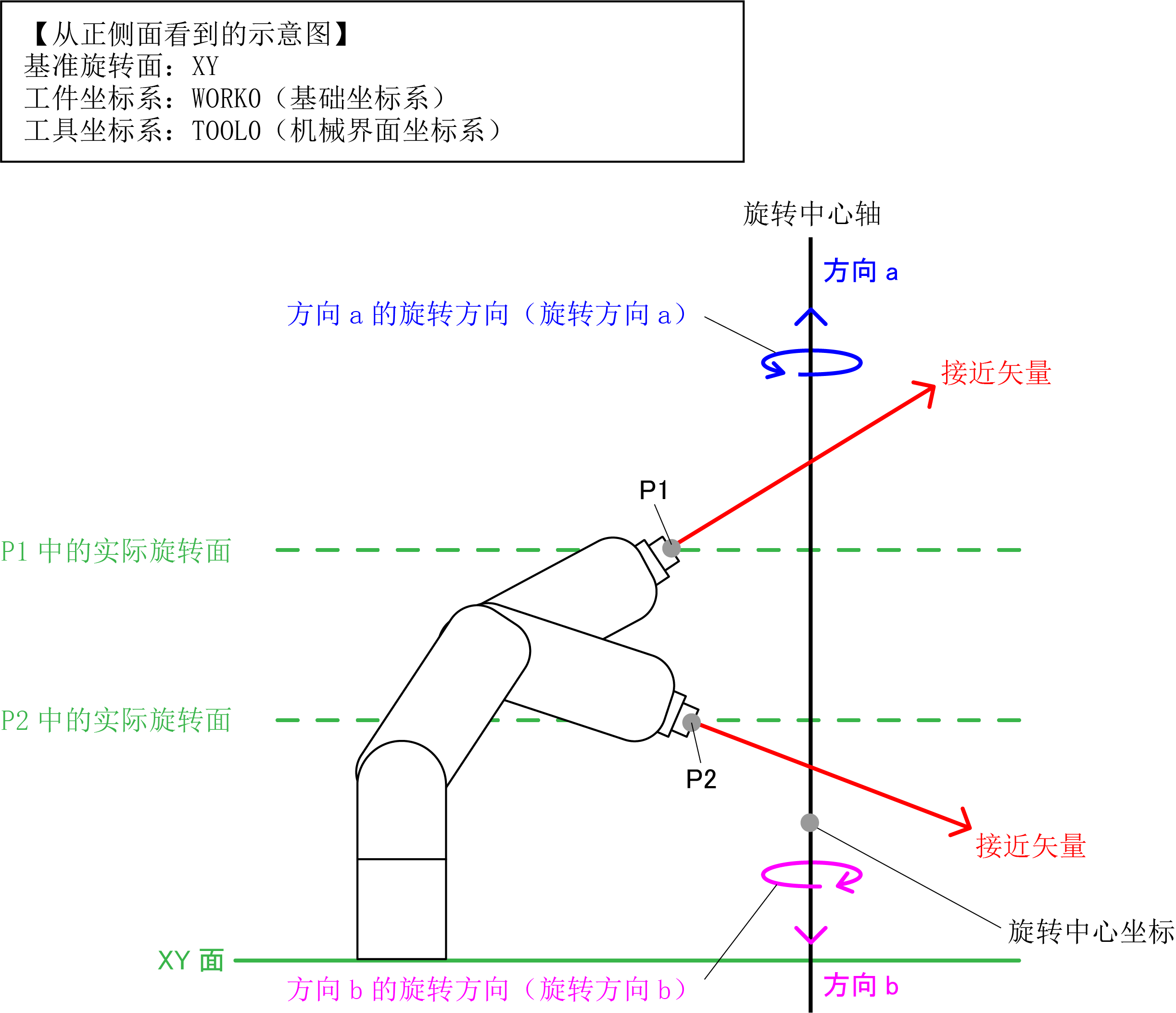
相对旋转中心轴的矢量朝向,旋转方向为右螺纹旋转。
旋转中心轴的矢量方向有2个,不过由相对于实际旋转面的接近矢量的朝向决定。
例如,在下图所示的情况,旋转中心轴的矢量方向存在方向a和方向b。此时,当当前位置为P1时,相对与实际旋转面,接近矢量朝向方向a侧,因此旋转方向为旋转方向a。当当前位置为P2时,方向相反,因此旋转方向为旋转方向b。
将static设为无效后,当前位置上的趋近矢量方向与实际旋转面平行时,旋转方向不再固定一个方向,即使相同的动作,旋转方向也有可能随时改变。此时,请修改当前位置或实际旋转面的条件,或者将static设为有效。将static设为有效后,无论趋近矢量的方向如何,旋转中心矢量的方向都是固定的。详细内容请参照以下说明。
指定为“static=[有效]”时
旋转中心轴的矢量方向变为固定,和趋近矢量与实际旋转面的方向无关。旋转中心轴的矢量方向取决于指定的基准旋转面。
指定旋转中心坐标
旋转中心坐标的坐标系因指定的基准旋转面而异。请参照下表。
| 指定的基准旋转面 | 坐标系 | 关于省略 |
|---|---|---|
XY、YZ、ZX |
请在当前的工件坐标系指定坐标。 | 可省略。 省略时,当前的工件坐标系的原点为旋转中心坐标。 |
XYH、YZH、ZXH |
请在当前的工具坐标系指定坐标。 | 不可省略 |
| 任意的倾斜平面 | 请在当前的工件坐标系指定坐标。 | 可省略。 省略时,指定的基准旋转面的第1个矢量型数据为旋转中心坐标。 |
指定旋转选项
旋转选项用于指定是否随圆弧动作使姿势旋转。
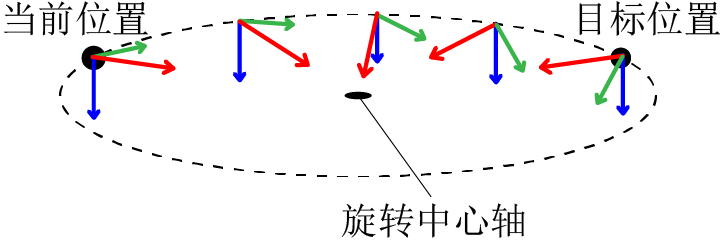
如果指定为“Pose = 1”,在执行圆弧动作的同时姿势也以旋转中心为轴旋转。
如果指定“Pose = 2”,则仅保持当前位置的姿势,沿轨迹执行圆弧动作。
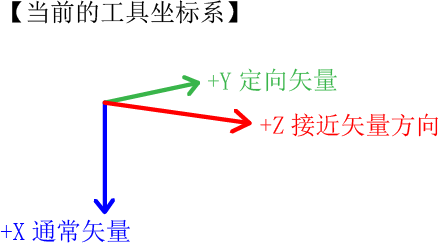
当前的工具坐标系如下图实施的状态时,动作事例如下所示。
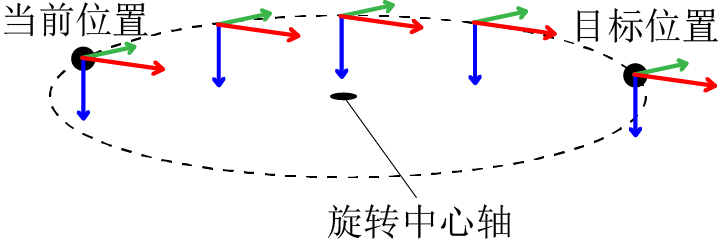
- 当Pose=1时
 |
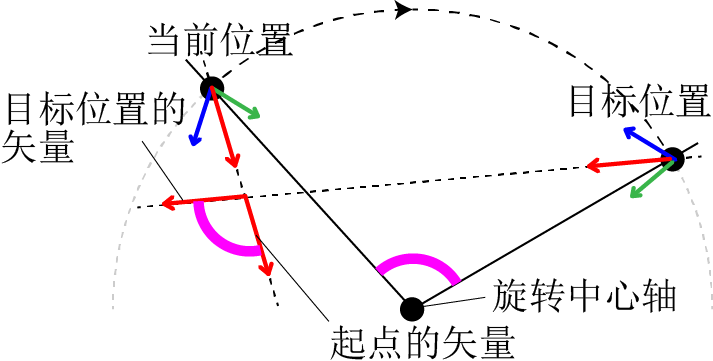 |
上图表示从实际旋转面的正上方看到的左图的示意图。 工具坐标系的各矢量以旋转中心轴为轴,仅旋转与指定的旋转角度相同的角度。 例如,使用接近矢量时,当前位置的接近矢量与目标位置的接近矢量构成的角度与指定的旋转角度相同。 |
- 当Pose=2时
 |
相关项目
注意事项
根据机器人的当前位置,有时在动作路径中存在不能动作的部位,发生错误。此时,请修订机器人的当前位置、旋转的条件。
应用示例
'!TITLE“围绕轴的旋转动作”
' 按指定的角度围绕垂直于旋转面的轴执行旋转动作
Sub Sample_Rotate
Dim aaa As Position
Dim bbb As Position
TakeArm Keep = 1
' 在aaa中代入当前位置
aaa = CurPos
' 围绕与经过V[1]点的XY平面相垂直的轴旋转45度
Rotate XY, 45, V[1]
' 在bbb中代入当前位置
bbb = CurPos
' 在讯息输出视窗中显示初始位置
PrintDbg aaa
' 在讯息输出视窗中显示当前位置
PrintDbg bbb
End SubID : 209
- 本页相关信息
- Rotate动作例子