
ID : 210
RotateH
功能
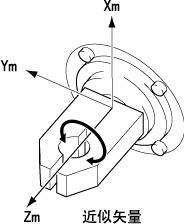
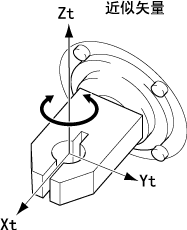
以近似矢量为轴,做旋转动作。
格式
RotateH 旋转角 [, 动作选项]
指定项目
解说
以近似矢量为轴进行相对旋转动作。接近矢量的朝向可以根据工具坐标的定义自由改变。下图为示例。
执行该语句时,任务必须获取机器人轴的控制权。
TOOL0(机械界面坐标系) |
用TOOL定义变更矢量方向和偏移原点 |
相关项目
注意事项
-
应用示例
'!TITLE "以近似矢量为轴的旋转动作"
' 发出动作命令后,执行通过动作,以相对旋转角30度旋转
Sub Sample_RotateH
Dim aaa As Position
TakeArm Keep = 1
aaa = P( 400, 300, 400, 180, 0, 180, -1 )
' 从当前位置向aaa的坐标位置移动
Move P, aaa
' 设定TOOL编号1
ChangeTool 1
' 执行通过动作,以相对旋转角30度旋转
RotateH @P 30
' 设定TOOL编号0
ChangeTool 0
End SubID : 210