
ID : 5468
传感器的设定
力感应器的有效化
操作路径:基本画面 - [F2 机械臂] - [F6 辅助功能] - [F1 使用条件]
通过“使用条件”画面将项目名“力感应器使用状态”设定为有效。

感应器种类的设定
操作路径:基本画面 - [F2 机械臂] - [F2 力量控制] -[F5 传感器] - [F1 传感器设定]
设定要使用的感应器的种类。
关于详细内容,请参照下表。
| No. | 项目名 | 内容 | 说明 |
|---|---|---|---|
| 1317 | 感应器种类 |
0:WACOH |
使用株式会社Wacoh-tech制力感应器时选择。 |
|
1:ATI |
使用ATI Industrial Automation制力感应器时选择。 |
||
|
2:SINTOKOGIO |
使用新东工业株式会社制力感应器时选择。 |
根据设定的感应器种类,下表的参数的初始值相应变化。
| 感应器种类 | 变化的参数 | ||
|---|---|---|---|
| No. | 项目名 | 初始值 | |
| 0:WACOH | 1115 | 端口编号 | 5001 |
| 1314 | 连接方法 | 0(TCP) | |
| 1:ATI | 1115 | 端口编号 | 49152 |
| 1314 | 连接方法 | 1(UDP) | |
| 2:SINTOKOGIO | 1115 | 端口编号 | 10001 |
硬件设定
操作路径:基本画面 - [F2 机械臂] - [F2 力量控制] -[F5 传感器] - [F1 传感器设定]
进行硬件设定。设定内容根据感应器的种类而不同。关于详细情况,请参照以下内容。
使用利用力感应器的力量控制功能时,如果传感器直接检测的力和力矩超过限制值,则发生0x8320152F“力量控制、控制力超限”。
限制值为“力感应器力检测范围”和“力感应器力矩检测范围”。
株式会社Wacoh-tech制的力感应器
购入株式会社Wacoh-tech制造的力感应器时随附有数据表,请输入该设定值。
| No. | 项目名 | 单位 |
|---|---|---|
| 1116 | 力换算值(X) | pulse/N |
| 1117 | 力换算值(Y) | pulse/N |
| 1118 | 力换算值(Z) | pulse/N |
| 1119 | 力矩换算值(RX) | pulse/Nm |
| 1120 | 力矩换算值(RY) | pulse/Nm |
| 1121 | 力矩换算值(RZ) | pulse/Nm |
| 1122 | 力感应器力检测范围 | N |
| 1123 | 力感应器力矩检测范围 | Nm |
ATI Industrial Automation制的力感应器
ATI Industrial Automation制的力感应器时,请设定以下的值。
| No. | 项目名 | 单位 | 设定值 |
|---|---|---|---|
| 1116 | 力换算值(X) | pulse/N | 1000000 |
| 1117 | 力换算值(Y) | pulse/N | 1000000 |
| 1118 | 力换算值(Z) | pulse/N | 1000000 |
| 1119 | 力矩换算值(RX) | pulse/Nm | 1000000 |
| 1120 | 力矩换算值(RY) | pulse/Nm | 1000000 |
| 1121 | 力矩换算值(RZ) | pulse/Nm | 1000000 |
新东工业株式会社制的力感应器
新东工业株式会社制的力感应器时,将所使用的感应器的额定值代入下表的换算式,设定算出的值。
| No. | 项目名 | 单位 | 设定值 (换算式) |
|---|---|---|---|
| 1116 | 力换算值(X) | pulse/N | 10000 / 並进力Fx的额定值(绝对值)[N] |
| 1117 | 力换算值(Y) | pulse/N | 10000 / 並进力Fy的额定值(绝对值)[N] |
| 1118 | 力换算值(Z) | pulse/N | 10000 / 並进力Fz的额定值(绝对值)[N] |
| 1119 | 力矩换算值(RX) | pulse/Nm | 10000 / 力矩Mx的额定值(绝对值)[Nm] |
| 1120 | 力矩换算值(RY) | pulse/Nm | 10000 / 力矩My的额定值(绝对值)[Nm] |
| 1121 | 力矩换算值(RZ) | pulse/Nm | 10000 / 力矩Mz的额定值(绝对值)[Nm] |
力感应器的额定值请参照“可使用的力感应器”。
例如,使用标准机型的力感应器时,如下所示。
力换算值(X) = 10000 / 500 = 20 力换算值(Y) = 10000 / 500 = 20 力换算值(Z) = 10000 / 500 = 20 力矩换算值(RX) = 10000 / 20 = 500力矩换算值(RY) = 10000 / 20 = 500力矩换算值(RZ) = 10000 / 20 = 500
安装位置和负载条件的设定
操作路径:基本画面 - [F2 机械臂] - [F2 力量控制] -[F5 传感器] - [F1 传感器设定]
关于详细内容,请参照下表。
安装位置的设定
| No. | 项目名 | 单位 |
|---|---|---|
| 1034 | 安装位置(X) | mm |
| 1035 | 安装位置(Y) | mm |
| 1036 | 安装位置(Z) | mm |
| 1037 | 安装位置(RX) | deg |
| 1038 | 安装位置(RY) | deg |
| 1039 | 安装位置(RZ) | deg |
设定力感应器坐标系。设定值为任意设定。
关于力感应器坐标系,请参照以下“力感应器坐标系”。
力感应器坐标系
力感应器坐标系为表示力感应器检测力和力矩方向的坐标系。
设定安装位置时,如下图所示,指定从TOOL“0”坐标系观察到的力感应器的坐标原点和坐标轴方向。
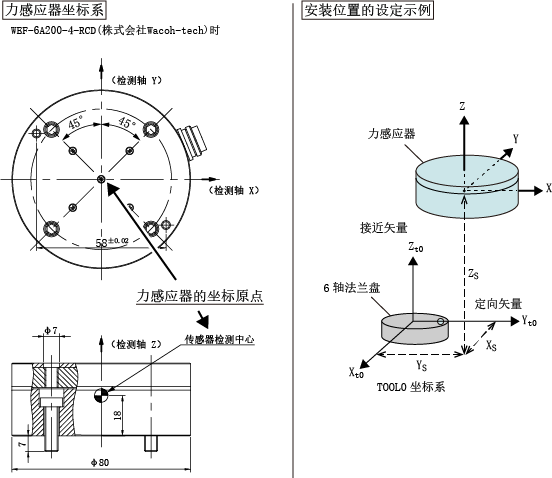
在上图“安装位置的设定示例”中,力感应器的坐标原点位于TOOL0坐标系的(Xs,Ys,Zs),坐标轴方向为围绕TOOL0坐标系的Z轴旋转90度的方向,因此设定安装位置时,输入(Xs,Ys,Zs,0,0,90)。
力感应器的坐标原点记载于各力感应器的外形图中。
新东工业株式会社制力感应器时,“感应器焦点”为力感应器的坐标原点。
ATI Industrial Automation制力感应器时,“Sensing Reference Frame Origin”为力感应器的坐标原点。
负载条件的设定
| No. | 项目名 | 单位 |
|---|---|---|
| 1297 | 传感器前端负载质量 | g |
| 1298 | 传感器前端负载重心位置X | mm |
| 1299 | 传感器前端负载重心位置Y | mm |
| 1300 | 传感器前端负载重心位置Z | mm |
| 1301 | 传感器前端负载重心惯量Ix | kgcm² |
| 1302 | 传感器前端负载重心惯量Iy | kgcm² |
| 1303 | 传感器前端负载重心惯量Iz | kgcm² |
设定力感应器前端负载的质量和重心位置、重心惯量。
(例)力感应器前端带有夹治具时,设定加上夹治具安装撑条和夹治具后的质量和重心位置、重心惯量。
关于传感器前端负载重心位置,请参照下图。
负载重心位置
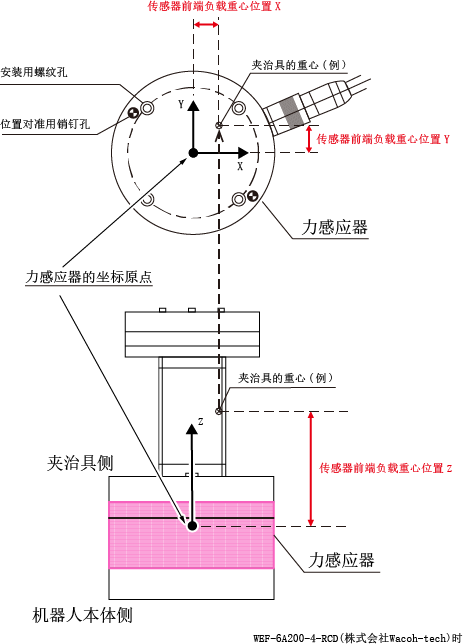
请正确设定传感器前端的负载质量和重心位置。如果未正确设定,则负载的重力补偿不正确,执行利用力感应器的力量控制功能时机器人动作可能异常。
传感器上限检查功能的设定
力量控制中,进行额定值的上限检查。由于在力量控制以外进行高速动作,因此如果不执行额定值的上限检查而直接动作,则可能导致传感器故障。传感器上限检查功能用于防止该故障,超过用户指定的上限时将输出错误。设定下表的参数。Ver1.8.*及更高版本可使用该功能。
| No. | 项目名 | 单位 | 说明 |
|---|---|---|---|
| 1310 | 传感器力上限值 | N | 设定传感器上限检查功能的上限力[N]。 |
| 1311 | 传感器力矩上限值 | Nm | 设定传感器上限检查功能的上限力矩[Nm]。 |
| 1312 | 传感器上限检查 | - | 设定传感器上限检查功能的有效/无效。 |
未设定传感器上限检查功能时,可能导致传感器故障,请务必进行设定。
力感应器和的通信设定
为了与力感应器通信,进行机器人控制器的通信设定。设定内容根据与力感应器的通信方法而异。详细情况请参照以下的内容。
用RS-422A通信时
用RS-422A进行通信时,请设定下表的参数。
| No. | 项目名 | 说明 |
|---|---|---|
| 1314 | 连接方法 | 设定连接传感器时的通信方法。设置为“2:RS422”。 |
| 1316 | 用户端口编号 | 设定传感器的用户端口编号在“RS-422A通信板的设定”的“将FIFO缓冲设为有效”中,输入选择的RS-422A的COM编号。 |
Ver2.2.*及更高版本可使用该功能。
用以太网通信时
用以太网进行通信时,请设定下表的参数,并输入力感应器上设定的IP地址。
| No. | 项目名 | 说明 |
|---|---|---|
| 1314 | 连接方法 | 设定连接传感器时的通信方法。ATI Industrial Automation制力感应器时,设定为“1:UDP”。 |
关于力感应器上设定的IP地址的输入方法,请参照这里。
力感应器的确认
安装力感应器后,通过“力感应器值的监视功能”的“传感器值”确认设定是否正确。
请注意,如果使用错误的IP地址设定以致连接至其它传感器、混淆安装位置,则会导致力量控制方向错误并破坏工具和工件。
力感应器的复位
需要复位力感应器时,请通过多功能教导器或指令进行。
多功能教导器
力感应器通过传感器校准进行复位。详细方法请参照“力量控制传感器设定”。
指令
如果通过ForceSensor指定为“0”,则执行力感应器的复位。详细方法请参照ForceSensor。
ID : 5468
- 本页相关信息
- 输入力感应器上设定的IP地址