
ID : 1138
使用新东工业株式会社制的力感应器时
在这里说明使用利用力感应器的力量控制功能时,使用新东工业株式会社制的力感应器时所需的设备。
- 该制造商的力感应器在机器人控制器的软件版本为Ver.2.11.0以上时可使用。
可使用的力感应器
可使用新东工业株式会社制的力感应器“ZYXer”系列。
已确认动作的传感器
| 型号 / 模型名称 | 额定负荷 | 外形图 / 规格书 | ||
|---|---|---|---|---|
| 并进力 [N] | 力矩 [Nm] | |||
ZYX080A501Z (*2) |
Fx、Fy、Fz : ±500 |
Mx、My、Mz : ±20 |
详细内容请参照新东工业株式会社的主页。 |
|
低载重模型 (*1) |
Fx、Fy : ±50 Fz : ±100 |
Mx、My : ±0.5 Mz : ±0.5 |
外形图(PDF:427KB) | |
标准模型 (*2) |
Fx、Fy : ±500 Fz : ±500 |
Mx、My : ±20 Mz : ±20 |
外形图(PDF:198KB) | |
中载重模型 (*2) |
Fx、Fy : ±1000 Fz : ±1000 |
Mx、My : ±30 Mz : ±30 |
外形图(PDF:207KB) | |
大载重模型 (*1) |
Fx、Fy : ±5000 Fz : ±10000 |
Mx、My : ±500 Mz : ±250 |
外形图(PDF:281KB) | |
|
*1,*2 : 上述的力感应器有的内置了转换器 (将力感应器的信号转换成机器人控制器可以接收的信号的设备),有的没有内置。上表中记为(*1)的模型未内置转换器,记为(*2)的机型内置了转换器。(*1)的模型时,连接力感应器和机器人控制器时,要通过外置的转换器连接。 共通规格各模型与机器人控制器的信息交换都是通过RS-422A通信进行的。 RS-422A通信的通信速度,标准为46800bps。购买力感应器时可以变更为92160bps,但机器人控制器只能用46800bps通信。因此,请注意不要将通信速度变更为92160bps。 |
||||
上述各力感应器的信息是全部信息的一部分。详细内容请参照新东工业株式会社的主页。
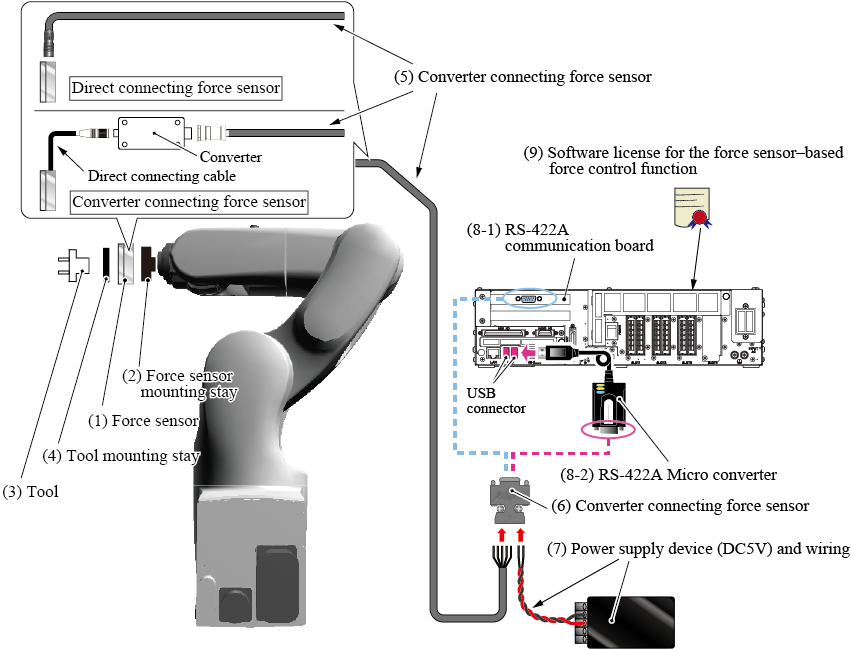
系统构成
系统构成如下图所示。
请定期点检力感应器。
构件/ 制造商/类型(选件号) |
内容 | ||||
|---|---|---|---|---|---|
(1)力感应器新东工业株式会社
|
请根据使用状况选择。 若购买转换器连接型力感应器,包装中附带转换器。此外,转换器连接型力感应器的连接转换器和力感应器的电缆直接装在力感应器自身上。直装电缆的长度为2m。 请将转换器固定至机器人的机械臂。 转换器连接型力感应器和转换器是一对一的关系。各自带有序列号,请连接序列号相同的产品。 |
||||
(2)力感应器安装撑条由客户制作 |
用于将力感应器安装到机器人前端。 详细内容,请参照“力感应器的安装方法”制作。 |
||||
(3)工具由客户选定 |
请根据客户的规格选择。 | ||||
(4)工具安装撑条由客户制作 |
用于将力感应器安装到工具。 请参照“可使用的力感应器”的外形图进行制作。 |
||||
(5)力感应器电缆新东工业株式会社
|
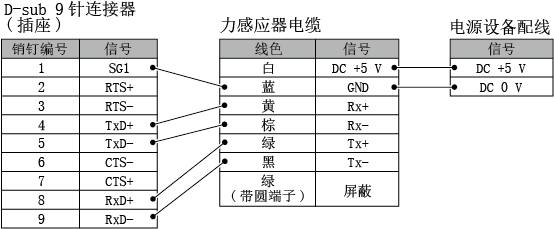
这是连接力感应器和机器人控制器用的电缆。购买力感应器时,请指定长度。 连接至机器人控制器一侧的电缆端为散线。请在以下所示的D-sub 9针连接器(插座)上连接散线使用。 接线方法请参照后述的“D-sub 9针连接器(插座)的接线方法”。 |
||||
(6)D-sub 9针连接器 (插座)由客户选定 |
这是将力感应器电缆和以下所示的电源设备的配线连接至机器人控制器用的连接器。 接线方法请参照后述的“D-sub 9针连接器(插座)的接线方法”。 |
||||
(7)电源设备(DC5V)及配线由客户选定 |
这是向力感应器供电用的电源装置及其配线。 请选定以下规格的产品。
接线方法请参照后述的“D-sub 9针连接器(插座)的接线方法”。 |
||||
|
可以从以下2个当中选择通过RS-422A通信使力感应器和机器人控制器进行通信的设备。
|
|||||
(9)利用力感应器的力量控制功能软件许可证株式会社DENSO WAVE
|
这些是本公司的产品。 使用利用力感应器的力量控制功能的许可证。 “将功能设为有效后出厂”就是在机器人组出厂时,预先将功能设为有效后再出厂。请在订购机器人组时提出。 在通过已购买的机器人组使用功能时,请订购“仅许可证”。“仅许可证”时,需要注册许可证,将客户机器人控制器的功能设为有效。 关于将功能设为有效的步骤请参照“功能的有效化”。 |
||||
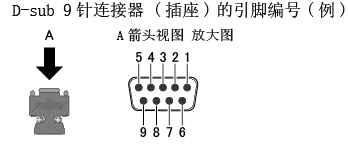
D-sub 9针连接器(插座)的接线方法
在D-sub 9针连接器 (插座)的各个引脚上按照下图所示分配引脚奥编号进行说明。
下图表示接线方法(配线表)。请参照下图接线。
ID : 1138