
ID : 1149
输入力感应器上设定的IP地址
要通过以太网和力感应器通信,需要输入力感应器上设定的IP地址。
输入方法如下所示。
1
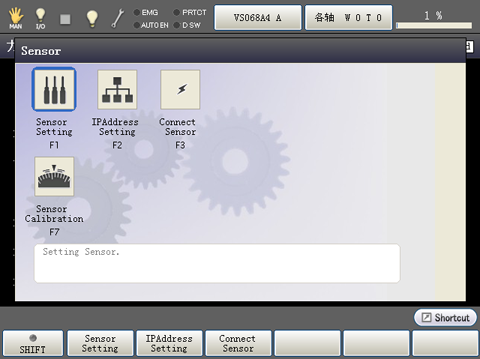
按压基本画面-[F2 机械臂]-[F2 力量控制]-[F5 传感器]。
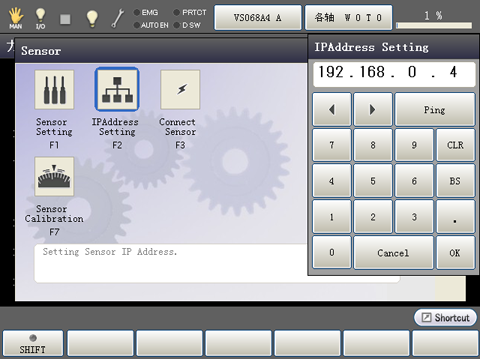
显示“传感器”画面后,按压[F2 IP地址设定]。
2
输入力感应器的IP地址,并按压[OK]按钮。
IP地址和端口编号的确认
如果按压[F1 传感器设定],则显示“传感器设定”画面。
可确认IP地址和端口编号。
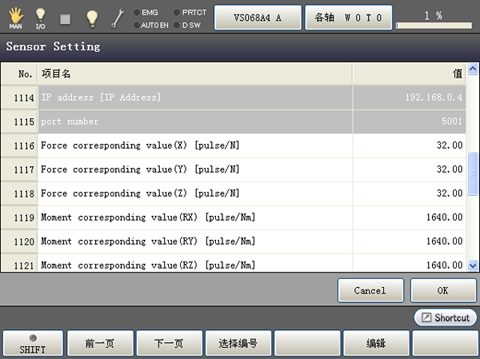
在“传感器设定”画面中,不能编辑IP地址和端口编号。
力感应器的再次连接
机器人控制器和力感应器的连接断开时,按压“传感器”画面上的[F3 传感器连接]按钮。
ID : 1149