
ID : 3332
MC8系列控制机器人 × 2 (仅内部轴)
采用该组合方式,购买后MC8系列动作控制器(以下称为 MC8系列)中只带有MC8系列1台的数据(“项目数据”)。要控制2台机器人,需要将1台的项目数据分成2个项目数据。
要分成2个项目数据,使用协调控制、双机械臂工具。
但是,分成2个的项目数据是1个个单独控制内部轴的数据。
要将内部轴作为机器人控制,需要将分成2个的项目数据转换成机器人控制用的数据。该转换使用运动学设定工具。
以下表示全体的设置步骤,包括上述内容在内。
| 实施项目 | 概要 |
|---|---|
| 1. 配线 | 在MC8系列上连接内部轴的电机或多功能教导器等。 |
| 2. 软件许可证的登录 | 在MC8系列上登录软件许可证。 |
| 3. 项目数据的接收和分割 | 从MC8系列接收项目数据,分割该数据。 |
| 4. 转换机器人控制用的项目数据 | 使用运动学设定工具,转换成机器人控制用的项目数据。 |
| 5. 发送项目数据 | 向MC8系列发送2台的项目数据。 |
以下说明各实施项目。
1. 配线
在MC8系列上连接或内部轴的电机、多功能教导器、电源电缆等必要的设备。
请参考“系统构成”的“MC8系列控制机器人 × 仅2 内部轴”实施。
2. 软件许可证的登录
MC8系列上已预先登录了软件许可证时,请进入下一步的“项目数据的接收和分割”(购买了软件许可证已登录的MC8系列等时)。
此外,软件许可证尚未登录时,在MC8系列上连接多功能教导器,登录双机械臂控制用许可证。根据需要登录运动学功能的许可证或其他许可证。
关于登录方法,请参照选项的“许可证登录”。
3. 项目数据的接收和分割
使用WINPCAPSIII接收项目数据。此外,使用协调控制·双机械臂工具分割所接收的数据。协调控制·双机械臂工具是在安装WINCAPSIII时同时安装的软件。
按以下步骤进行。
1
从MC8系列接收项目数据。
具体来说,在WINCAPSIII上创建新项目时,选择“从控制器获取信息,并新建”作为创建方法创建后,就从MC8系列接收项目数据,保存该数据作为新建项目数据。
关于操作方法,请参照“WINCAPSIII指南”的“新建项目”。
2
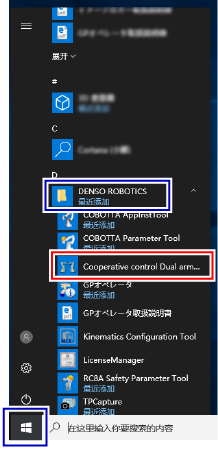
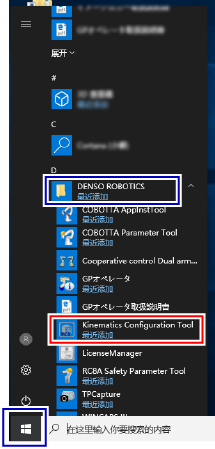
启动协调控制·双机械臂工具。
(下图是Windows10的画面) |
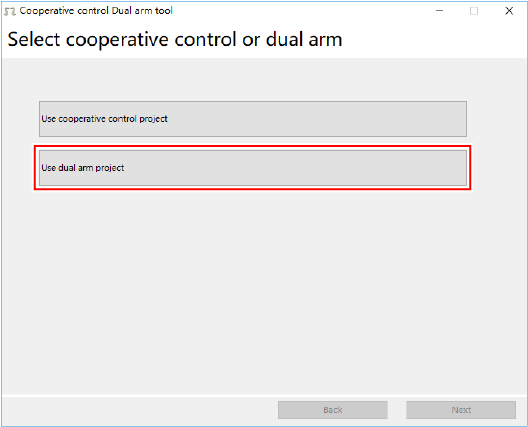
3
选择“使用双机械臂项目”。
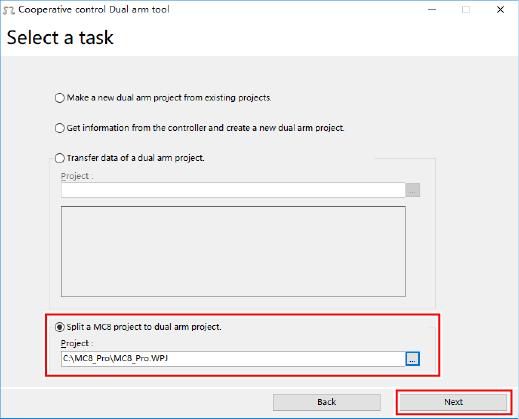
4
选择“分割MC8项目并设定双机械臂功能”,在“项目”栏中输入刚才新建的项目数据的项目文件(扩展名 : wpj)。请按绝对路径输入项目文件的存储位置。
然后,单击[下一步]。
在此指定的项目数据自身是不分割的,是将分割的项目数据保存为别的项目数据。
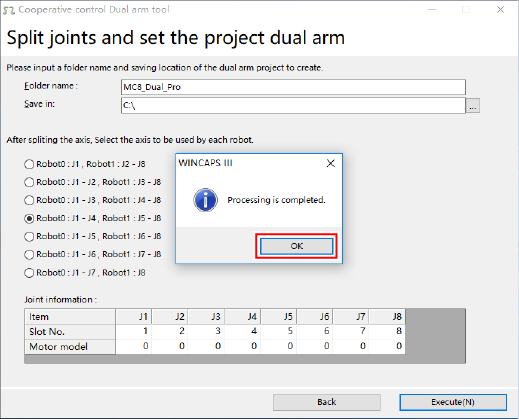
5
对于分割后的项目数据,输入文件夹名和保存位置。
然后,选择轴的分割方法。例如,控制4轴机器人2台时,选择
- "Robot0 : J1 - J4 , Robot1 : J5 - J8"
。
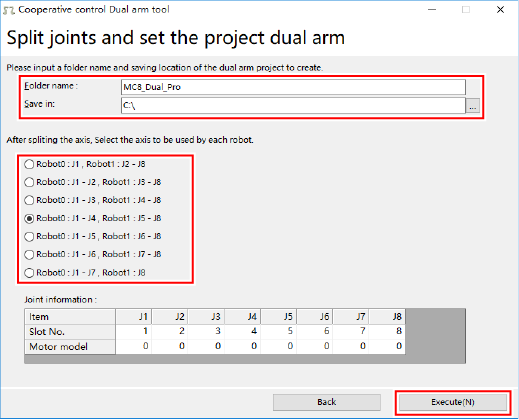
使用的轴数少于8时,着眼于Robot0使用的轴数。例如,Robot0想用3轴机器人、Robo1想用4轴机器人时,由于Robot0使用3个轴,因此选择
- "Robot0 : J1 - J3 , Robot1 : J4 - J8"
。此时,第8轴被忽略。
此外,想在Robot0或Robot1中包含附加轴时,也要着眼于Robot0中使用的轴数。例如,Robot0想用4轴机器人 + 1个附加轴、Robo1想用3轴机器人时,由于Robot0合计使用5个轴,因此选择
- "Robot0 : J1 - J5 , Robot1 : J6 - J8"
。
选择了轴的分割方法后,单击[执行]。
6
项目数据的分割处理要花数秒钟,因此请稍等片刻,直到显示下图所示的结束讯息。
显示结束讯息后,单击[OK]结束。
4. 转换机器人控制用的项目数据
要转换机器人控制用的项目数据,使用运动学设定工具。运动学设定工具是在安装WINCAPSIII时同时安装的软件(关于详细内容,请参照“MC8系列(动作控制器)使用说明书”的“运动学设定”)。
Robot0和Robot1都不作为机器人控制时,请进入下一步的“发送项目数据”。
以下是转换成机器人控制用的项目数据的步骤。
1
启动运动学设定工具。
(下图是Windows10的画面) |
2
选择“编辑原有项目”,在刚才分割的Rotot0和Robot1的项目数据中,将要转换成机器人控制用的项目文件(扩展名 : wpj)输入“项目”栏。请按绝对路径输入项目文件的存储位置。
关于项目数据的文件夹构成,请参照“双机械臂控制用项目的概念”。
此外,将Rotot0和Robot1都转换成机器人控制用时,请1个个进行转换。
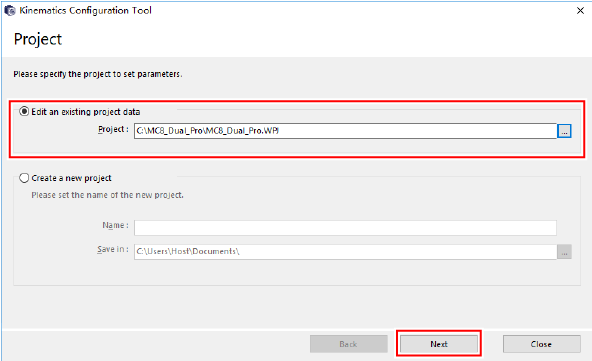
单击[下一步]后,依次显示机器人形状的选择视窗及机械臂长度的设定视窗,请按照视窗的内容进行设定。
3
最后,显示“完成”视窗,关闭该视窗结束。
5. 发送项目数据
发送项目数据。发送方法请参照“收发项目数据”。
要实际进行动作,需要设定各种参数。设定的方法与使用附加轴时相同,请参考“附加轴使用说明书”的“附加轴起动步骤(滚珠丝杠)”进行设定。
ID : 3332