
ID : 3349
收发项目数据
与RC8系列机器人控制器(以下称为 RC8系列)或者MC8系列动作控制器(以下称为 MC8系列)进行项目数据收发的工具有以下2种。
协调控制·双机械臂工具是在安装WINCAPSIII时同时安装的软件。
以下说明各工具的操作方法。
用协调控制·双机械臂工具收发的方法
使用协调控制·双机械臂工具,统一收发Robot0和Robot1的数据。
按照以下步骤进行。
1
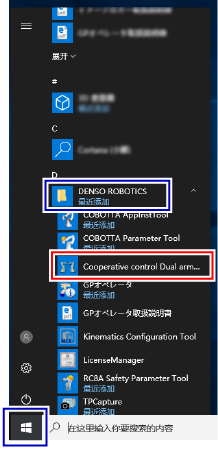
启动协调控制·双机械臂工具。
(下图是Windows10的画面) |
2
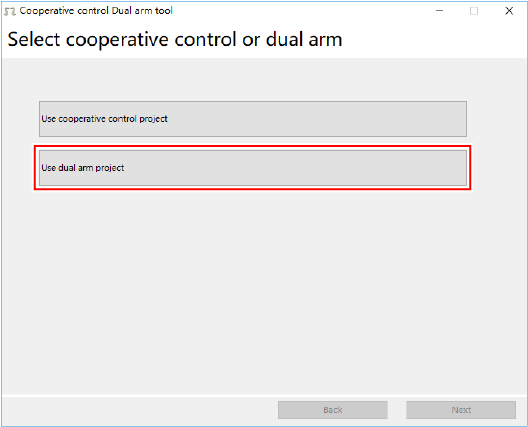
选择“使用双机械臂项目”。
3
选择“进行双机械臂项目的发送接收数据”,在“项目”栏中输入要收发的双机械臂控制用项目的项目文件。请按绝对路径输入项目文件的存储位置。
此外,项目文件请输入Robot0的 (关于项目数据的文件夹构造,请参照“双机械臂控制用项目的概念”)。输入Robot1的项目文件则无法收发。
发送者或者接收者的RC8系列或者MC8系列的IP地址,要使用所输入的项目文件的项目中设定的IP地址。在协调控制·双机械臂工具上不会指定IP地址,因此请提前确认好IP地址。IP地址的确认方法请浏览以下参照位置。
- 项目的IP地址 : ”WINCAPSIII指南”的“通信设定”
- RC8系列或者MC8系列的IP地址 : “多功能教导器操作指南”的“通信设定画面的显示·变更”
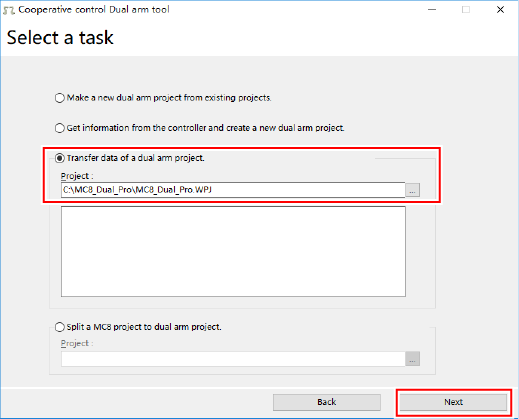
输入项目文件后,单击[下一步]。
4
选择“发送”或“接收”,单击[下一步]后,所选择的处理即被执行。

至此,收发结束。
通过WINCAPSIII进行收发的方法
基本的操作步骤与收发通常的项目数据时相同。
关于双机械臂控制用项目固有的内容,以下分成2个项目进行说明。
收发编辑中的双机械臂控制用项目数据时
从WINCAPSIII的[通信]菜单中选择[发送接收数据],显示[发送接收数据]视窗,进行收发。
但是,可收发的数据根据已打开的项目数据而不同 (关于项目数据的文件夹构造,请参照“双机械臂控制用项目的概念”)。
- 已打开Robot0的项目数据时
-
可收发Robot0和Robot1的数据。但是,对于Robot1,无法选择要收发的数据,必须收发全部数据。
- 已打开Robot1的项目数据时
-
只能收发Robot1的数据。
新接收双机械臂控制用项目数据时
下面将针对RC8系列或者MC8系列中已经带有双机械臂控制用项目数据的情况下,对新接收项目数据进行说明。
在这种情况下创建新项目时,创建方法选择“从控制器获取信息,并新建”并创建,即可接收Robot0和Robot1的数据(双机械臂控制用项目数据)。
关于操作方法,请参照“WINCAPSIII指南”的“新建项目”。
ID : 3349