
ID : 3334
双臂控制用项目的概念
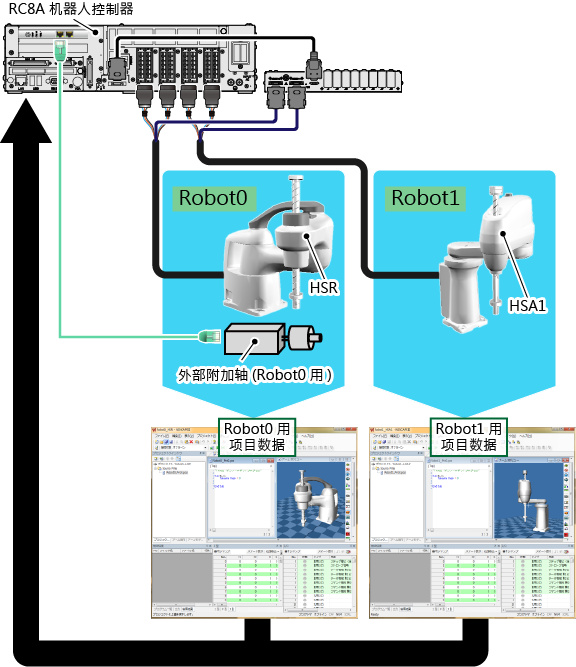
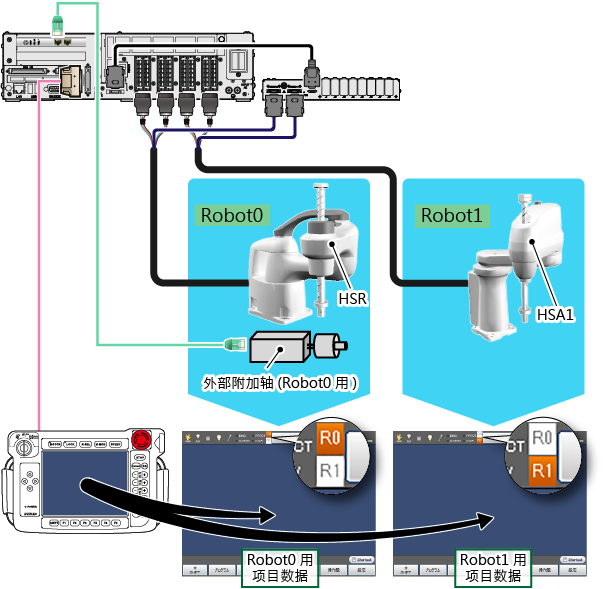
在双臂控制功能中,RC8系列机器人控制器(下称RC8系列)或者MC8系列动作控制器(下称MC8系列)管理2个的项目数据。
下图表示控制HSR和HSA1以及外部附加轴时的例子。
有关管理2个项目数据的方法,分下述2个项目进行说明。
在WINCAPSIII上的管理
在WINCAPSIII上,通过下图所示的文件夹构成,管理2个项目数据。
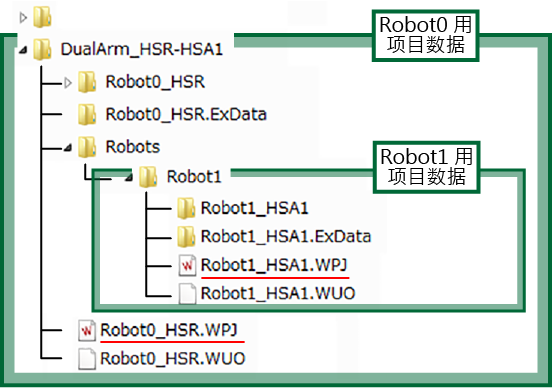
在Robot0用的项目数据中的“Robots”文件夹中,存储了Robot1的项目。
在WINCAPSIII上编辑Robot0的项目数据时,对于上图的情形,打开“Robot0_HSR.WPJ”(项目文件),可进行。对于Robot1的情形,打开“Robot1_HSA1.WPJ”。
在开头的系统构成图上,外部附加轴被接在Robot0用上。进行外部附加轴的设定时,打开Robot0的项目,然后按照与不使用双臂控制功能时(用1台RC8系列或者MC8系列控制1台机器人时)相同的操作进行(参照“外部附加轴(EtherCAT)使用说明书”的“参数设定”)。
作为系统构成,使用MC8系列,或者使用内部附加轴时,各种设定也打开各机器人的项目数据,按照与不使用双臂控制功能时相同的操作进行。
要将设定后的数据发给RC8系列或者MC8系列,需要双臂控制功能特有的操作。请参照“项目数据的收发”。
有关将外部轴分配给各机器人,详细的思路在“将外部轴分配给各机器人”中记载。使用外部轴时,也请参照这里。
在多功能教导器上的管理
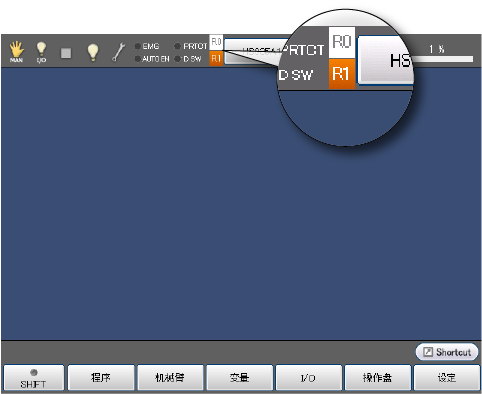
在多功能教导器上,通过“机器人选择”切换2个项目。
按照以下步骤切换。
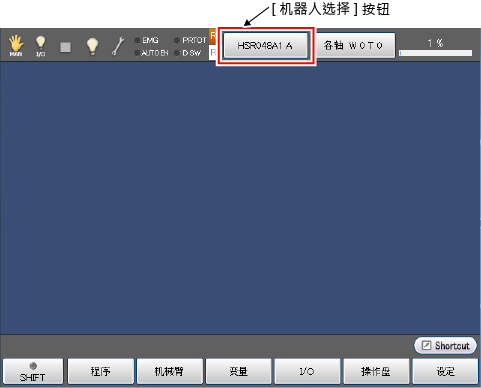
1
按[机器人选择]按钮。
2
从机器人选择清单选择想编辑项目数据的机器人。
机器人选择清单的R0与R1的含义如下:
| R0 : Robot0 |
| R1 : Robot1 |
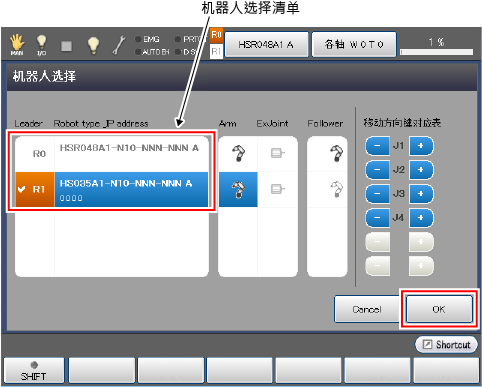
在此分析编辑Robot1的项目数据的情形。此时,选择R1的机器人,按[OK]。
3
[机器人选择]按钮的左边图标变成用橙色阴影填充了“R1”的状态。如果在该状态进行参数设定,就是设定Robot1的项目数据的参数。
将用橙色阴影填充的机器人叫做“领导”。这一思路与使用协调功能时相同。但是,只是叫法相同,只要不使用协调功能,功能(领导与跟随者协调动作等)就不会是相同的。
至此,机器人的选择操作就结束了。
综上所述,通过“机器人的选择”将某一个机器人设为“领导”,切换编辑对象的项目数据。
另外,设为“领导”的机器人成为操作对象的机器人。例如,将Robot0(R0)设为“领导”时,手动动作、变量移动针对Robot0进行。
ID : 3334
- 本页相关信息
- 将外部轴分配给各机器人