
ID : 3330
HSR / HSA1的组合
按照本组合购买后,RC8A机器人控制器(以下称为 RC8A)上已带有2台RC8A的数据(”项目数据”)。但是,RC8A上不带有一方机器人(Robot1)的CALSET值和RANG值。这些值保存在Robot1机器人的包装中附带的USB存储器中。因此,需要将该数据读入RC8A。
以下表示全体的设置步骤,包括上述内容在内。
| 实施项目 | 概要 |
|---|---|
| 1. 配线 | 在RC8A上连接机器人或多功能教导器等。 |
| 2. 软件许可证的登录 | 在RC8A上登录软件许可证。 |
| 3. 读取CALSET值和RANG值至RC8A | 从USB存储器中读取Robot1的CALSET值和RANG值至RC8A。 |
以下说明各实施项目。
1. 配线
在RC8A上连接机器人或多功能教导器、电源电缆等必要的设备。
请参考”系统构成”的”HSR / HSA1的组合”实施。
2. 软件许可证的登录
使用本组合,必须在RC8A上登录双机械臂控制用许可证后再出厂。因此,基本上不需要软件许可证的登录。
使用电动夹治具等的选项时,如果尚未登录这些的软件许可证,则需要登录。
登录在多功能教导器上进行。关于登录方法,请参照选项的“许可证登录”。
3. 在RC8A上加载CALSET值和RANG值
在RC8A上加载CALSET值和RANG值要使用多功能教导器。
按以下步骤进行。
1
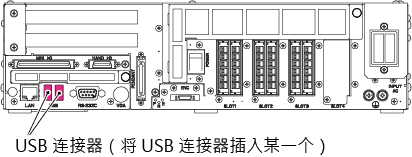
在RC8A上插入Robot1的机器人的包装中附带的USB存储器。
2
如果将用户级别设为“维护”,按照以下的操作路径进行操作,则显示下图的[双机械臂设定]视窗。
操作路径 : [F6 设定]-[F10 双机械臂] |
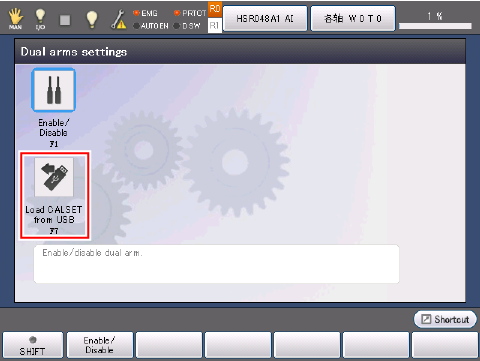
在上图的视窗中按[F7 CALSET USB读入]。
3
显示读取的确认讯息。按[OK]后,读取开始。
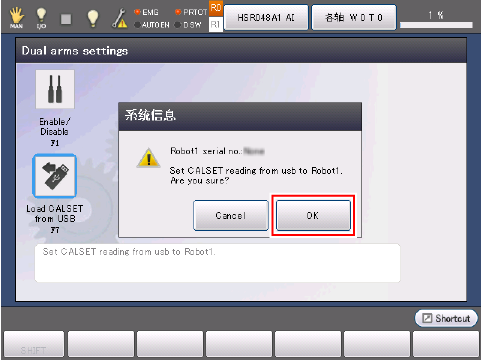
至此,CALSET值和RANG值读取结束。
想要用WINCAPSIII接收项目数据时,请参照“新接收双机械臂控制用项目数据时”。
ID : 3330