
ID : 3328
MC8系列控制机器人 × 2 仅外部轴
在此分以下项目说明系统构成的内容。
系统构成图
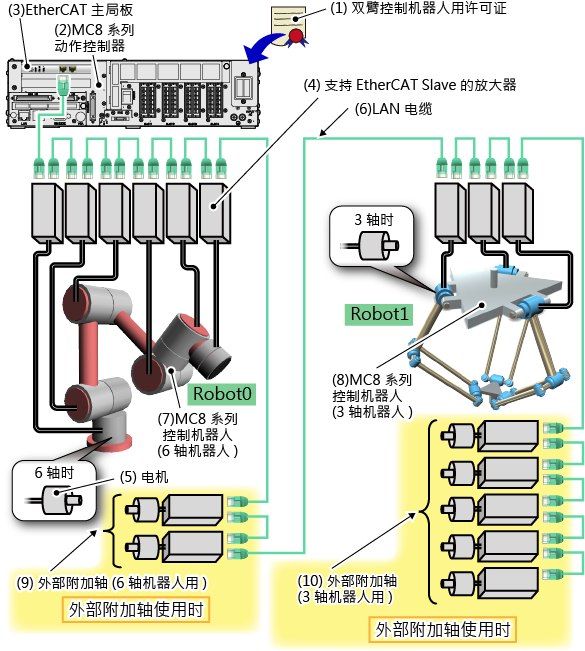
整体的系统构成如下图所示。
(下图表示作为MC8系列控制机器人控制6轴机器人和3轴机器人的例子。)
构件的说明
| 构件 | 内容 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
(1)双臂控制机器人用许可证 |
需要双臂控制用许可证。关于详细内容,请参照“许可证”。 |
||||||||||
(2)MC8系列动作控制器 |
控制2台MC8系列控制机器人的控制器。 在上述系统中,MC8或者MC8A均可使用。 上述系统构成在UL规格的MC8系列动作控制器上也一样。 有关外形、规格等的详细内容,请参照“MC8系列(动作控制器)使用说明书”。 |
||||||||||
(3)EtherCAT主局板 |
与外部轴进行EtherCAT通信的板。 需要软件许可证才能使用。 通过软件许可证与板的组合,准备了下述产品:
|
||||||||||
(4)支持EtherCAT Slave的放大器 |
预先规定了可使用的放大器。请参照位于“外部附加轴(EtherCAT)使用说明书”的“硬件连接构成”的“支持EtherCAT Slave的放大器”。 |
||||||||||
(5)电机 |
外部轴的电机。请使用通过您所使用的支持EtherCAT Slave的放大器动作的产品。 | ||||||||||
(6)LAN电缆 |
EtherCAT通信用电缆。 请使用范畴为5以上的双绞线。 直连和交叉中的任意一种接线方式均可使用。
|
||||||||||
(7)MC8系列控制机器人(6轴机器人) |
由顾客设计、制作的机器人。 机器人名是Robot0和Robot1中的哪一个,与接在机器人上的支持EtherCAT Slave的放大器有关。 从第一个接在EtherCAT主局板上的支持EtherCAT Slave的放大器起,依次分配Robot0的1轴、Robot0的2轴。 有关更详细的内容,请参照“分配给外部轴的各机器人”。 使用运动学设定时,需要有偿的软件许可证。
有关运动学设定,请参照“MC8系列(动作控制器)使用说明书”的“运动学设定”。 |
||||||||||
(8)MC8系列控制机器人(3轴机器人) |
|||||||||||
(9)外部附加轴(6轴机器人用) |
使用附加轴时,像上图那样连接,即可使用。 可使用的轴数为1台机器人以下的轴数:
不使用时请不要连接。 |
||||||||||
(10)外部附加轴(3轴机器人用) |
注意事项
-
实际连接各机器时,请阅读下述的参照位置后,安全实施。
参照位置 -
进行系统的设计、操作时,请阅读下述的参照位置后,安全实施。
参照位置
ID : 3328