
ID : 3350
将外部轴分配给各机器人
是相对于Robot0和Robot1的哪一个的外部轴,与支持EtherCAT Slave的放大器的连接顺序有关。
从第一个接在EtherCAT主局板上的支持EtherCAT Slave的放大器起,依次被当作Robot0用的轴分配,剩余的轴被当作Robot1用的轴分配。
例如,分析下图所示的系统构成。
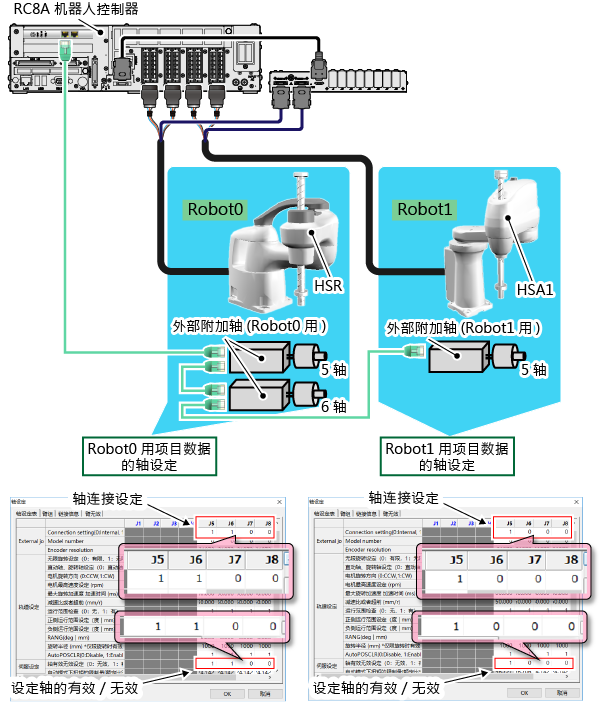
对于上图的情形,Robot0用项目数据的轴设定将5轴和6轴的2个轴作为外部附加轴使用。因此,从EtherCAT主局板起,依次数2个轴被当作Robot0用的外部轴分配,剩余的轴被当作Robot1用的轴分配。
接下来在下图表示错误的例子。
在下图中,本来Robot0的外部附加轴想使用8个轴。
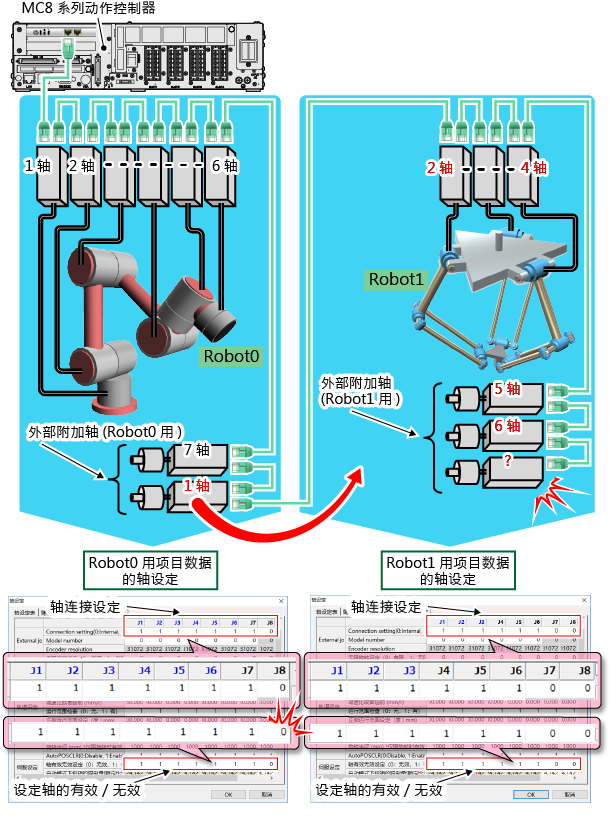
但是,在Robot0用项目数据的轴设定中,只设定了使用7个轴。此时,本来想作为Robot0的8轴的轴却被当作Robot1的1轴分配,不能使其像预期的那样动作。
另外,在Robot1用项目数据的轴设定中,如果只设定使用6个轴,项目数据的轴数与实际连接的轴数不一致,因而出错。
有关轴设定的方法,请参照“外部附加轴(EtherCAT)使用说明书”的“参数设定”。
ID : 3350