
ID : 441
Move C
功能
描绘圆弧的同时将机器人移至指定坐标。
格式
Move C, 经由位置, 目标位置[, 动作选项]
指定项目
解说
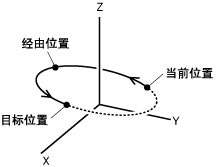
机器人沿着由当前位置、经由位置、目标位置3点描绘的圆弧,按照经由位置、目标位置的顺序移动。
注意事项
按照从当前位置向目标位置的姿势进行动作。忽略经由位置的姿势要素。当前位置和目标位置的形态不同时可能会发生错误。
应用示例
'!TITLE "向指定坐标移动"
' 描绘圆弧的同时向目标坐标位置移动
Sub Sample_MoveC
Dim aaa As Position
Dim bbb As Position
Dim ccc As Position
TakeArm Keep = 1
‘ 获取动作开始位置
aaa = P( 300, 100, 400, 180, 0, 180, -1 )
‘ 向动作开始位置aaa移动
Move P, aaa
' 获取经由位置
bbb = P( 600, 50, 400, 180, 0, 180, -1 )
' 获取目的位置
ccc = P( 300, -200, 400, 180, 0, 180, -1 )
‘ 从运作开始位置aaa通过bbb,描绘圆弧的同时向ccc移动
Move C, bbb, @P ccc
End SubID : 441