
ID : 6986
电动夹治具的使用方法
基本的动作
电动夹治具带有两根手指。根据打开/关闭2个手指来夹持/松开工件。
请配置为工件可移动到手指动作方向,以免负重集中到单侧手指。
| 打开手指的状态 | 关闭手指的状态 |
|---|---|
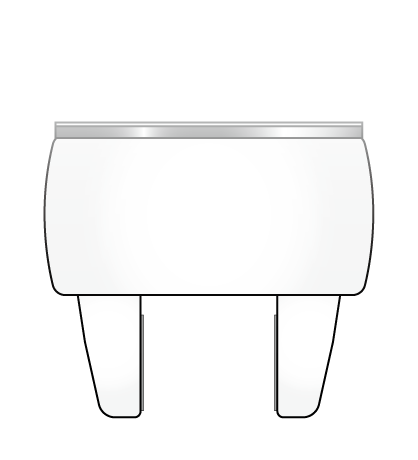 |
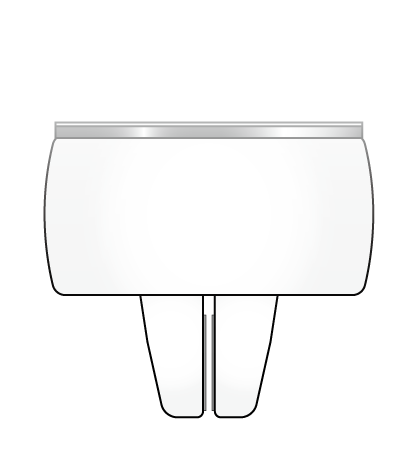 |
工件的夹持方法
由于工件形状各异,有时是以关闭手指的方式夹持,有时是以打开手指的方式夹持。
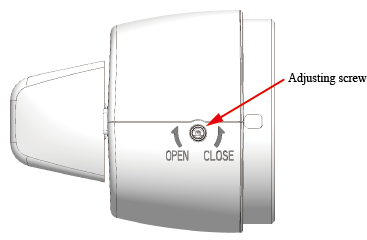
即使是在夹持工件的状态下OFF电机,手指的位置也会被自锁构造锁定,因此虽然继续维持夹持力,但有振动或冲击时,工件可能会掉落。请实施风险评估并采取适当的保护措施,以免因工件掉落发生危险。
用一字螺丝刀旋转夹治具侧面的调节螺丝旋转,以在电机OFF状态下移动手指。
情况下 |
关闭手指夹持时 |
打开手指夹持时 |
|---|---|---|
| 工件形状 | 夹住外侧来抓取 例:所有普通工件 |
通过内径抓取 例:销子、管件 |
选件品COBOTTA用电动夹钳打开手指后无法夹持。打开手持后夹持时,需要由客户准备夹钳或手指。更换手指的方法请参照产品信息的“COBOTTA用电动夹钳”。
工件宽度的范围
可用电动夹钳抓取的工件宽度(用手指抓取部分的宽度)有限度,但该限度因工件的夹持方法而异。按工件的夹持方法说明工件宽度的限度。
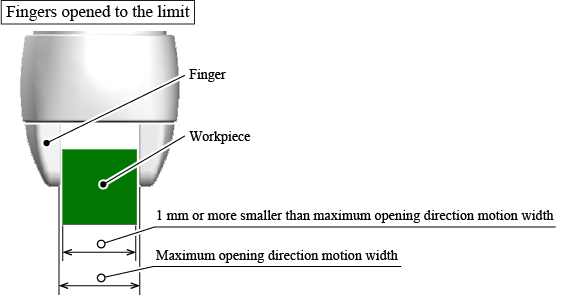
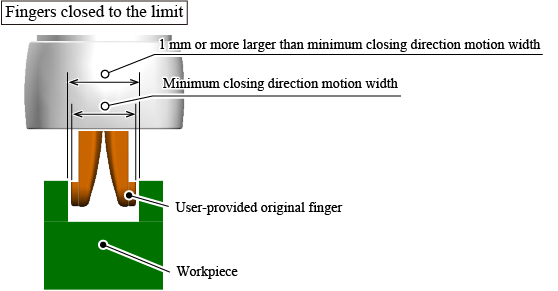
关闭手指夹持时
将手指打开到界限时的两指间距离称为开方向最大动作宽度。
工件的宽度(用手指抓取部分的宽度)需要比上述开方向最大动作宽度小1mm以上的值。
电动夹钳可以检测工件的夹持状态(是否已夹持)。但是,工件宽度不是上述开方向最大动作宽度小1mm以上的值时,可能无法正确检测夹持状态。
开方向最大动作宽度可通过夹治具参数之一的“开方向软件行程极限”变更。因此,如果变更“开方向软件程序极限”,比该值小1mm以上的值就是可抓取的工件宽度(使用客户独有的手指时,“开方向软件行程极限”的值偏移与标准手指形状之差的值。)。有关夹治具的变更方法,请参照“使用准备”。
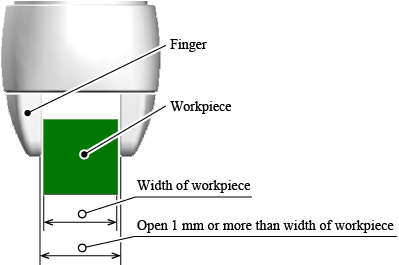
打开手指夹持时
该夹持方法只能在使用客户独有手指时可行。
将手指关闭到界限时的两指间距离称为闭方向最小动作宽度。
工件的宽度(用手指抓取部分的宽度)需要比上述闭方向最大动作宽度大1mm的大值。
工件宽度不是上述闭方向最小动作宽度大1mm的小值时,可能无法正确检测夹持状态。
闭方向最小动作宽度可通过夹治具参数之一的“闭方向软件行程极限”变更。因此,如果变更“闭方向软件程序极限”,比该值大1mm以上的值就是可抓取的工件宽度(实际上是“闭方向软件行程极限”的值偏移与标准手指形状之差的值。)。有关夹治具的变更方法,请参照“使用准备”。
工件的释放方法
工件的释放方法是执行与夹持动作相反的动作,此时有些事项应注意。注意事项因夹持方法而异,按夹持方法进行说明。
关闭手指夹持时的释放方法
打开比工件宽度(用手指抓取部分的宽度)大1mm。电动夹钳可以检测工件的夹持状态(是否已夹持)。但是,如果打开没有超过1mm,实际上会释放工件,但电动夹钳有可能会误检测为“工件夹持中”。
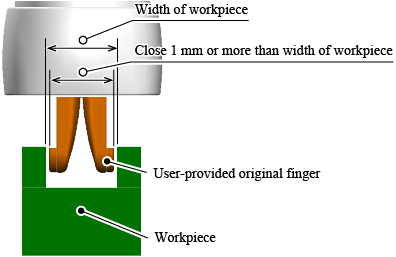
打开手指夹持时的释放方法
该夹持方法只能在使用客户独有手指时可行。
关闭比工件宽度(用手指抓取部分的宽度)大1mm。如果关闭没有超过1mm,实际上会释放工件,但电动夹钳有可能会误检测为“工件夹持中”。
夹持力的调整
正在使用夹治具时,夹持力可能因使用的循环数发生变化。与出厂时相比,夹治具的夹持力增加或减少时,使用夹治具输出调整功能调整夹持力。
使用此功能,则即便无法一个一个调整指令的自变量,也可批量增加或减少夹治具的电机输出。详细内容请参照“夹治具输出调整功能”。
夹治具夹持速度调整功能
批量变更夹治具夹持动作(手动动作、MoveH、MoveZH、MoveAH、MoveRH)的动作速度的功能。
详细内容请参照“夹治具夹持速度调整功能”。
通过程序进行手指操作
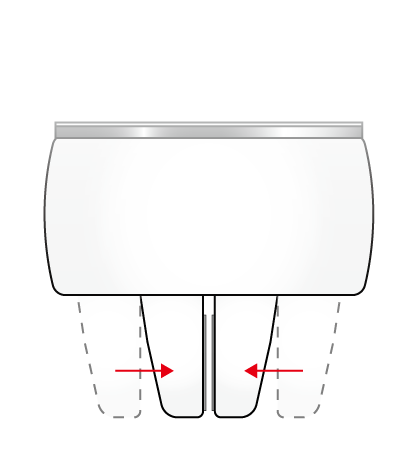
双侧的手指按照左右对称的方式分别进行动作。 右侧的手指(右手指)向右移动时,另一侧的手指(左手指)同时向左移动。
与机器人动作联动进行夹治具动作时,手指的动作由程序来指定。通过指定手指间距离,可以指定夹治具整体的动作。
当指示加大手指间距离时,夹治具将处于开放状态。反之,当指示减小手指间距离时,夹治具将处于关闭状态。
| 指示加大手指间距离。 | 指示减小手指间距离。 |
|---|---|
打开动作
|
关闭动作
|
手指的位置指定
手指的位置指定方法中有指定绝对位置的方法和指定相对位置的方法。
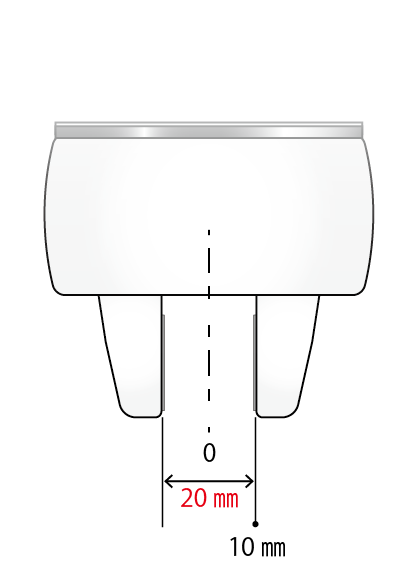
指定绝对位置
指定绝对位置时,要指定手指间的距离。手指的可运行范围是手指间距离0mm~30mm。两指相接触的点为0mm。
例如,指定手指间距离为20mm时,右手指移动至10mm的位置,左手指移动至反方向10mm的位置。夹治具整体呈20mm间隔打开的状态。
| 将手指间距离指定为20mm |
|---|
 |
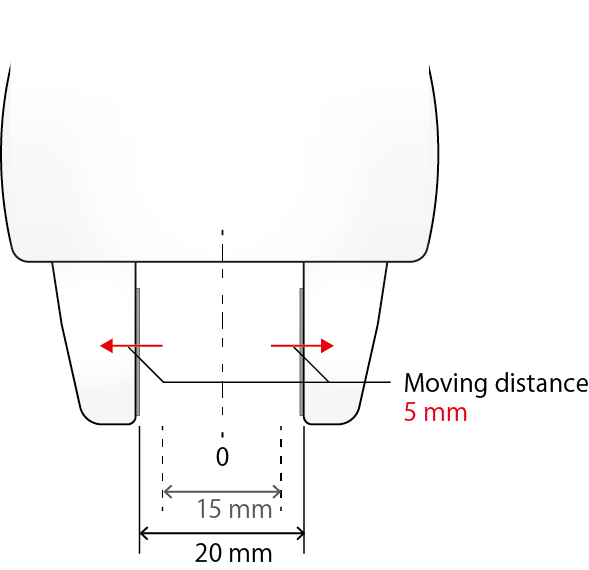
指定相对位置
指定相对位置时,要指定手指间的移动量。当移动量为正值时,手指只按照使两指距离变大的移动量进行移动。夹治具整体呈打开的动作。
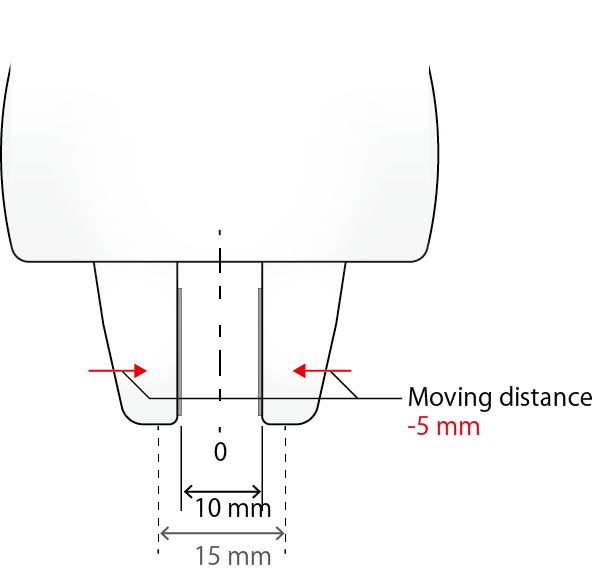
当移动量为负值时,手指只按照使两指距离变小的移动量进行移动。夹治具整体呈关闭的动作。
例如,两指间距离为15mm时,如发生5mm相对移动,整体将呈20mm打开的状态,因此右指移动10mm时,左指则向相反方向移动10mm。
如发生-5mm相对移动,整体将呈10mm打开的状态,因此右指移动5mm,左指则向相反方向移动5mm。
5mm相对移动 |
-5mm相对移动 |
|---|---|
 |
 |
- 当在手指间开放的距离大于运作范围的 30mm时启动电源,可能导致手指位置的初始化不顺利。
请调节夹治具侧面的螺丝,确保手指间距离在 30mm 以内之后,再启动电源。 - 手动旋转夹治具侧面的螺丝调整夹治具时,若夹治具的爪位置移动到可运行范围外,则请将爪位置调整到可运行范围内。夹治具的爪位置出现在可运行范围外时,夹治具可能不运行。
测点数据
程序中有既有通过指令直接指定手指动作方法、位置和移动量的方法,也有先采用测点数据的形式将预设的动作方式、位置和移动量记忆下来,再用指令调出后使用的方法。
测点数据可实施机器人位置示教时,以手动的方式来进行夹治具的开闭动作,并讲其结果记忆下来,使用起来非常便捷。
| 种类 | 指令 |
|---|---|
| 使用预设测点数据的指令 | |
| 通过指令直接指定手指的动作方法与位置和移动量 | HandMoveA |
ID : 6986