
ID : 7149
使用准备
使用电动夹钳中前设定夹治具参数。[57:夹治具种类]为必须,但其他夹治具参数则根据需要进行设定。
夹治具参数通过远程TP或者虚拟TP操作进行设定。
关于远程TP或者虚拟TP使用方法,请参照“TP应用程序操作指南”。
步骤
1
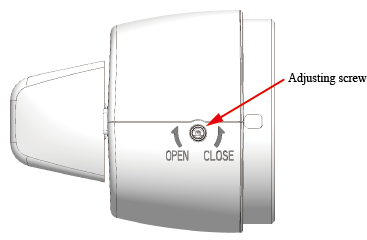
电机OFF状态下电动夹钳的手指张开大于30mm时,请用一字螺丝刀将夹治具侧面的调节螺丝旋转到“CLOSE”方向并使手指闭合。
2
通过以下路径打开夹治具参数的设定画面。
操作路径:基本画面-[F9 夹治具]-[F6 辅助功能]
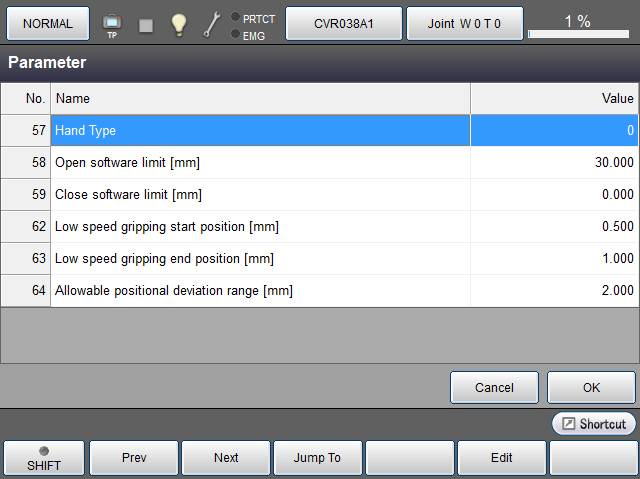
3
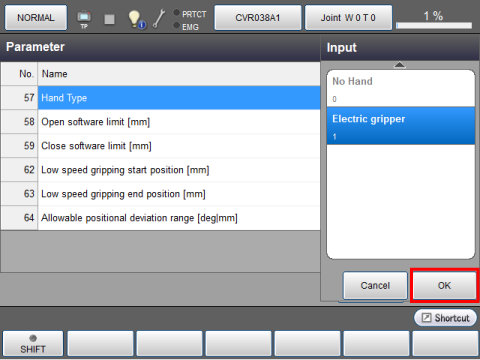
选择[57:夹治具种类],并按压[F5 编辑]按钮。
输入窗口将打开,请选择[电动夹钳]并按下[OK]按钮。
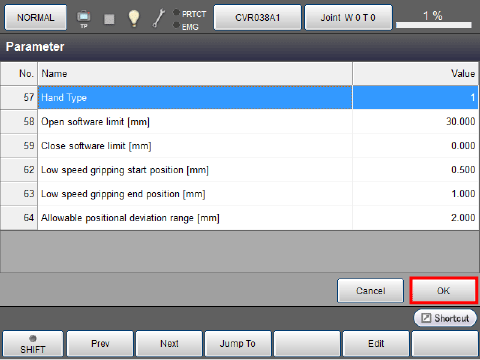
4
在参数画面按压“OK”按钮。
5
参数变更成功后,将显示系统讯息,此时可按压[OK]清除显示信息。
先关闭COBOTTA电源,再重新启动。
如不切断电源重启,该参数设定将无法生效。
6
其他夹治具参数如下记所示。
如需要对初始值进行变更,请按照Step2~Step4步骤进行。其他参数在设定后立即生效,无需重新启动电源。
| 参数种类 | 内容 |
|---|---|
| 夹治具种类 | 0: 无Hand/1:电动夹钳 |
| 开方向软件行程限制[mm] (*1) |
设定手指打开方向的可动界限。 范围:0~30 初始值:30 |
| 闭方向软件行程限制[mm] (*1) |
设定手指闭合方向的可动界限。 范围:0~30 初始值:0 |
| 低速夹持开始位置[mm] (*2) | 通过HandChuck指令可指定[加减速绝对位置移动・夹持]、[加减速相对位置移动・夹持]模式运行时以及HandMoveAH、HandMoveRH指令执行时的低速夹持开始位置。 |
| 低速夹持结束位置[mm] (*2) | 通过HandChuck指令可指定[加减速绝对位置移动・夹持]、[加减速相对位置移动・夹持]模式运行时以及HandMoveAH、HandMoveRH指令执行时的低速夹持结束位置。 |
| 位置偏差允许范围[mm] (*2) | 通过HandChuck指令可指定[绝对位置动作]、[相对位置动作]模式运行时以及HandMoveA、HandMoveR指令执行时的位置偏差允许值。 |
(*1) 开方向软件行程极限值,小于闭方向软件行程极限值时,将会发生错误。
请参照(*2)“电动夹治具的动作模式”。
ID : 7149