
ID : 7195
ロボットの位置教示とポイントデータ教示の連動
以下の手順で実施します。
連動手順
1
リモートTPまたはバーチャルTPで、下記の経路で、変数画面を開きます。
操作経路:基本画面 - [F3 変数]
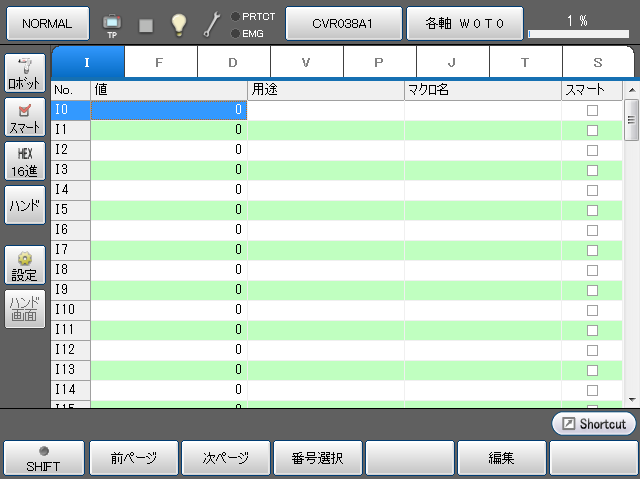
ハンドが有効化されているときは、変数画面の左側に[ハンド]ボタンが表示されます。
ハンドのポイントデータを取り込む場合は、[ハンド]ボタンを押します。
ハンドと連携を行うための[Hand]ボタンが画面下部に表示されます。

2
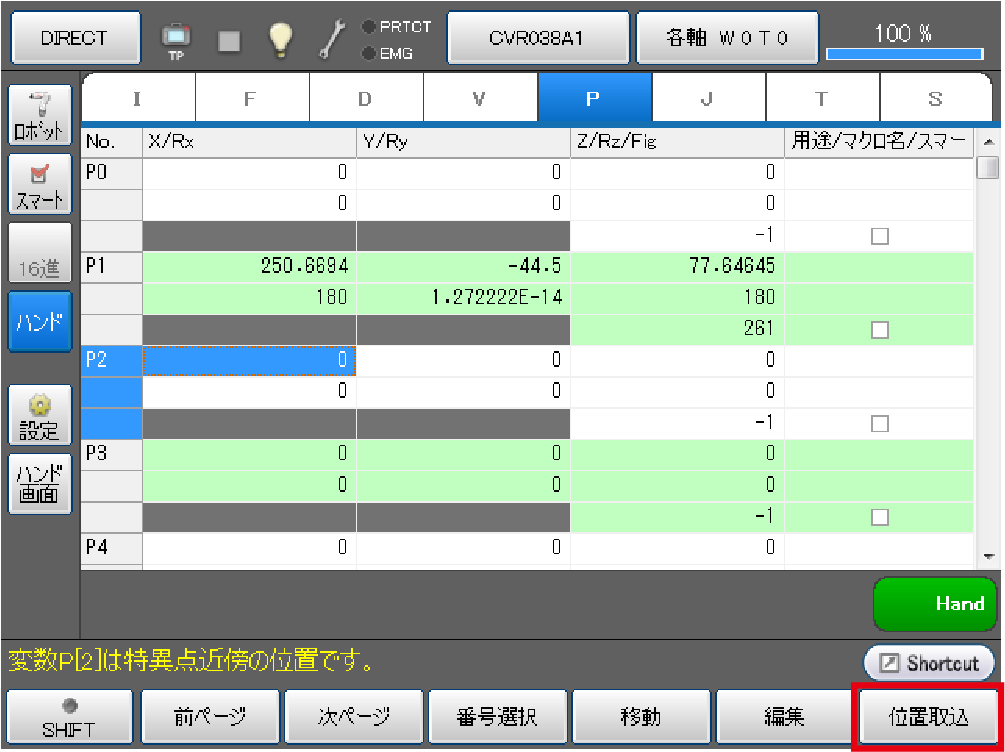
ロボットの位置を教示する変数のタブに切替え、変数番号を選択します。
位置の教示は、P型、J型、T型変数で可能です。
変数番号のデータ部分を押すことで選択ができ、色が青色になります。
操作の詳細についてはTPアプリ操作ガイドの "変数画面の表示・変更" を参照してください。

3
[NORMAL]表示されているボタンを押します。
ダイレクトモード設定画面が開くので、項目を設定し、[OK]ボタンを押します。
ダイレクトモード 操作の詳細については、TPアプリ操作ガイドの "ダイレクトティーチング" を参照してください。

4
手でCOBOTTA本体を移動させ、教示する位置・姿勢にします。
5
この位置・姿勢でハンドポイントの設定を行う場合は、[Hand]ボタンを押します。
ボタンの色が緑色になったら、連動状態です。

6
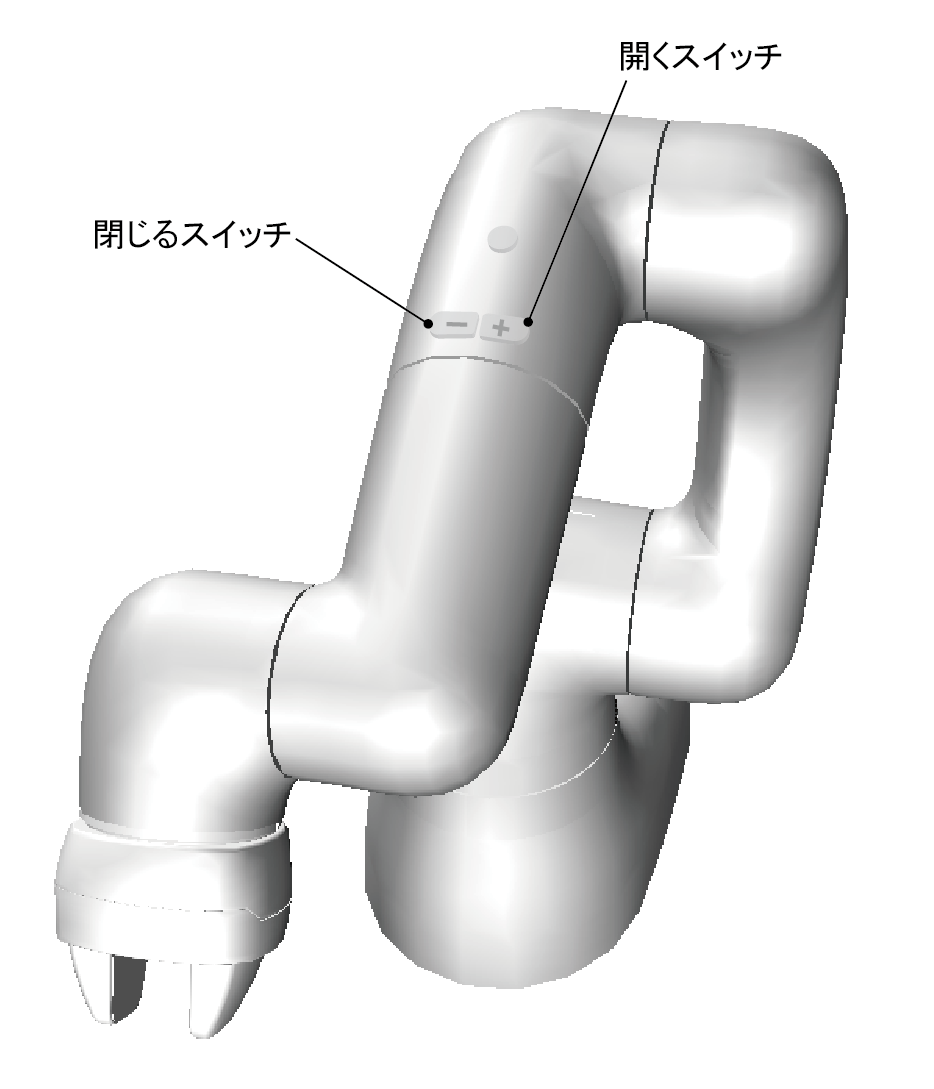
COBOTTAのアーム上にあるハンドの開閉スイッチを押して、フィンガの位置を決めます。
ハンドの開閉スイッチを押している間、フィンガを動作させることができます。
アーム上のハンド開閉スイッチを使用する場合は、"COBOTTAパラメータツール"で設定する必要があります。
詳細は、"COBOTTAパラメータツールガイド" を参照してください。
この時の動作によって、後の取込時に、自動的にハンドのモードが設定されます。
ワークの把持の教示は、実際のワークを使って行います。
| 操作 | 取込時のハンドのモード |
|---|---|
| ハンドを閉じてワークを把持する。 | 定速移動把持(閉)モード。 HandChuckコマンドで使用します。 |
| ハンドを開いてワークを把持する。 | 定速移動把持(開)モード。 HandChuckコマンドで使用します。 |
ハンドの開閉は行うが、ワークは把持しない。 |
絶対位置動作モード。 位置は現在のフィンガの位置が取り込まれます。 HandUnChuckコマンドで使用します。 |
7
ハンドの動作指定が完了したら、COBOTTAのアーム上のファンクションボタンを押すか、変数画面の[F6 位置取込]ボタンを押します。
ロボットの位置情報とポイントデータが取り込まれます。このときの変数番号とポイント番号は同じ番号です。
ハンドの情報として取り込まれるデータは、モード、移動量、速度、把持力となります。このモードはStep6でのハンドの動作から自動で決定されます。
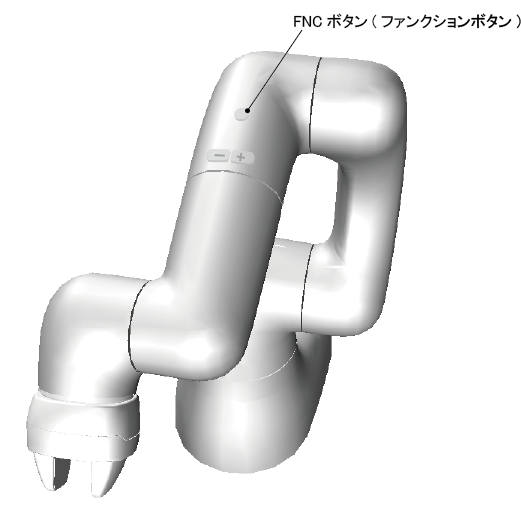
COBOTTAのアーム上のファンクションボタンを押した場合は、ただちにロボットの位置情報とハンドのポイントデータが取り込まれます。
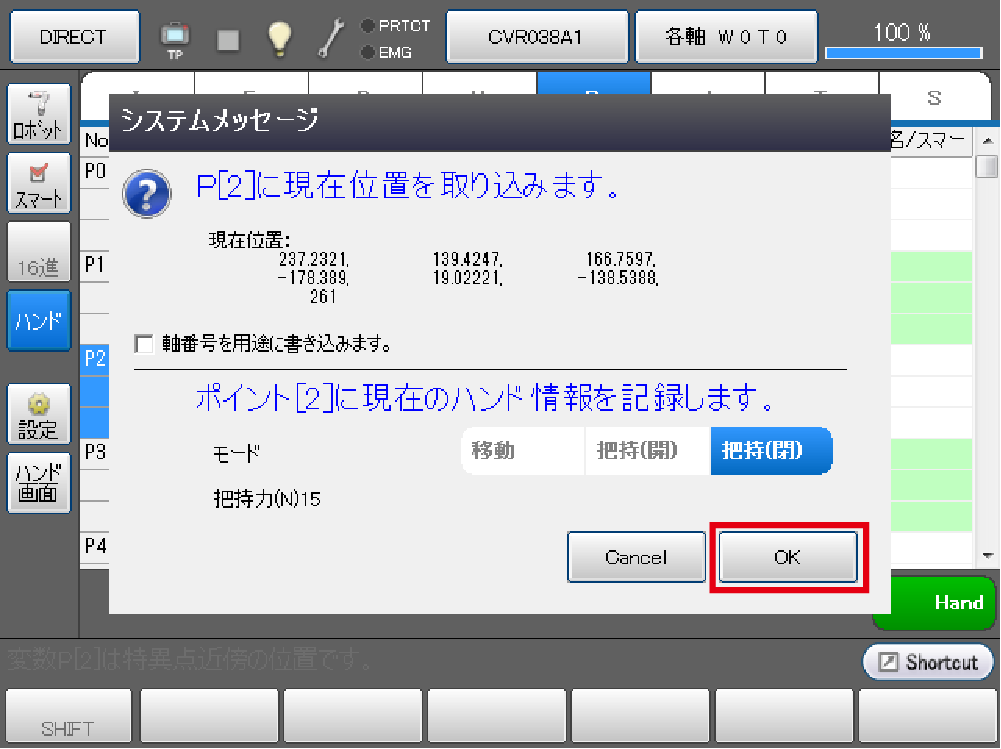
変数画面の[F6 位置取込]ボタンを押した場合は、別ウィンドウが開いて、ロボットの位置情報が上部に、ハンドのポイントデータの情報が下部に表示されます。
[OK]ボタンを押すと、ロボットの位置情報とハンドのポイントデータが取り込まれます。
8
他のロボットの位置とハンドのポイントデータも、同様にStep3~Step7の手順で教示します。
ポイントデータを取り込まない場合は、Step4の[Hand]ボタンを押して、連動を解除してから、Step5~Step6を実施せずに、Step7のロボットの[F6 位置取込]を行います。
[Hand]ボタンは、連動解除状態で押すと連動状態になりますが、連動状態で押すと連動が解除されます。
9
ハンドのモードを変更したい場合は、[ハンド画面]ボタンを押します。
ハンド画面が開きますので、ポイント番号を選択してモードを変更します。
ハンド画面での操作については、"ハンド画面の使い方" を参照してください。
この操作は、必要に応じて実施します。
確認手順
取り込んだポイントデータの確認も、ロボットの位置データ確認と連動して行うことができます。
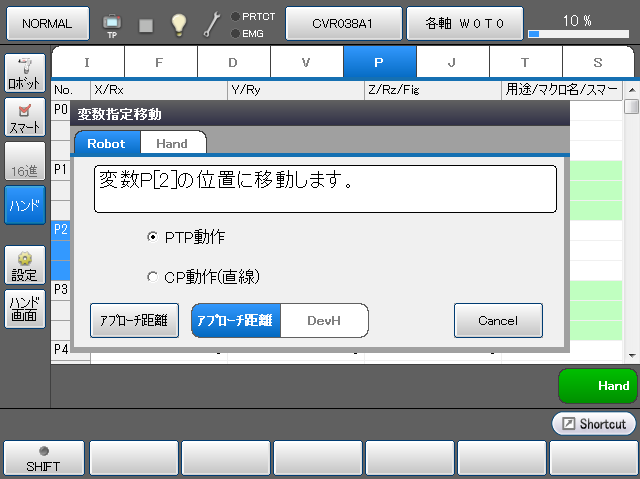
変数画面で変数を指定し、[Hand]ボタンを押して連動状態にして、[F4 移動]を押します。
下記画面でRobotとHandのタブが出ます。(変数のNoとハンドの変数のNoは連動)
変数移動をするとロボットの動作をして、終わるとハンドの変数移動が始まります。
ID : 7195