
ID : 7160
ハンド画面の使い方
ハンドの状態を確認したり、ハンドを手動で開閉したり、ポイントデータを設定するには、リモートTPまたはバーチャルTPのハンド画面で行います。
ここでは、ハンド画面の使い方を説明します。
ハンド画面の起動
リモートTPまたはバーチャルTP のトップ画面から[F9 ハンド]、もしくはショートカットキーから[ハンド]を選択します。 ハンド画面が起動します。
ハンド画面の構成
ハンド画面は、(1)ハンドの状態表示、(2)手動動作、(3)ポイントデータ表示の3つで構成されます。
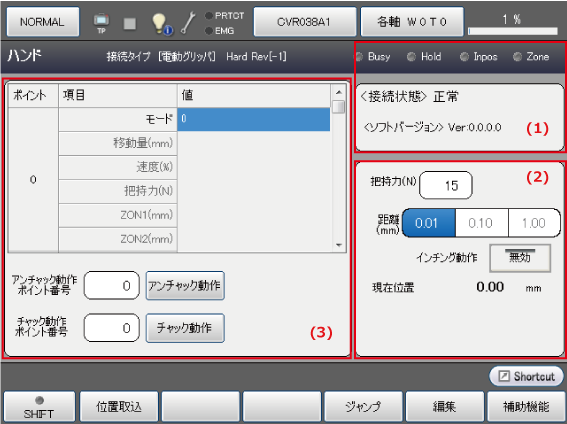
(1)ハンドの状態表示
ハンドの状態表示部では、ハンドの動作状態、接続状態、ソフトウェアバージョンが表示されます。表示される状態の種類は以下の通りです。
| Busy |
動作状態を表します。 点灯:動作中、消灯:コマンド受付可 |
|---|---|
| Hold |
把持状態を表します。 点灯:把持中、消灯:開放 |
| Inpos | ハンドの動作終了時の位置が目標位置に達しているかを表します。 点灯:到達している、消灯:到達していない |
| Zone | ハンドの動作終了時の位置がZone範囲内にある間ONになります。 点灯:範囲内、消灯:範囲外 |
| 接続状態 | ハンドの接続状態を表します。以下の3種類があります。 |
| ソフトウェアバージョン | ハンドのソフトウェアバージョンが表示されます。 |
(2)手動動作
リモートTP/バーチャルTPの手動操作ボタンを押すとハンドが動作します。手動動作を行う際に設定できる値は以下の通りです。COBOTTA本体のハンドプラスボタン/ハンドマイナスボタンによる動作時もこの設定値が使われます。
手動操作ボタンでハンドを動かす場合は、動作許可ボタンと同時に押してください。
| 把持力(N) (*1) |
手動動作時にワークを把持した際に、発揮する把持力を設定します。 単位は[N]です。最大把持力は20Nです。 |
|---|---|
| インチング動作 | インチング動作の有効/無効を切り替えます。 この画面でインチング動作を有効にすると、アーム上のハンドプラスボタン/ハンドマイナスボタンで操作するときもインチング動作になります。 |
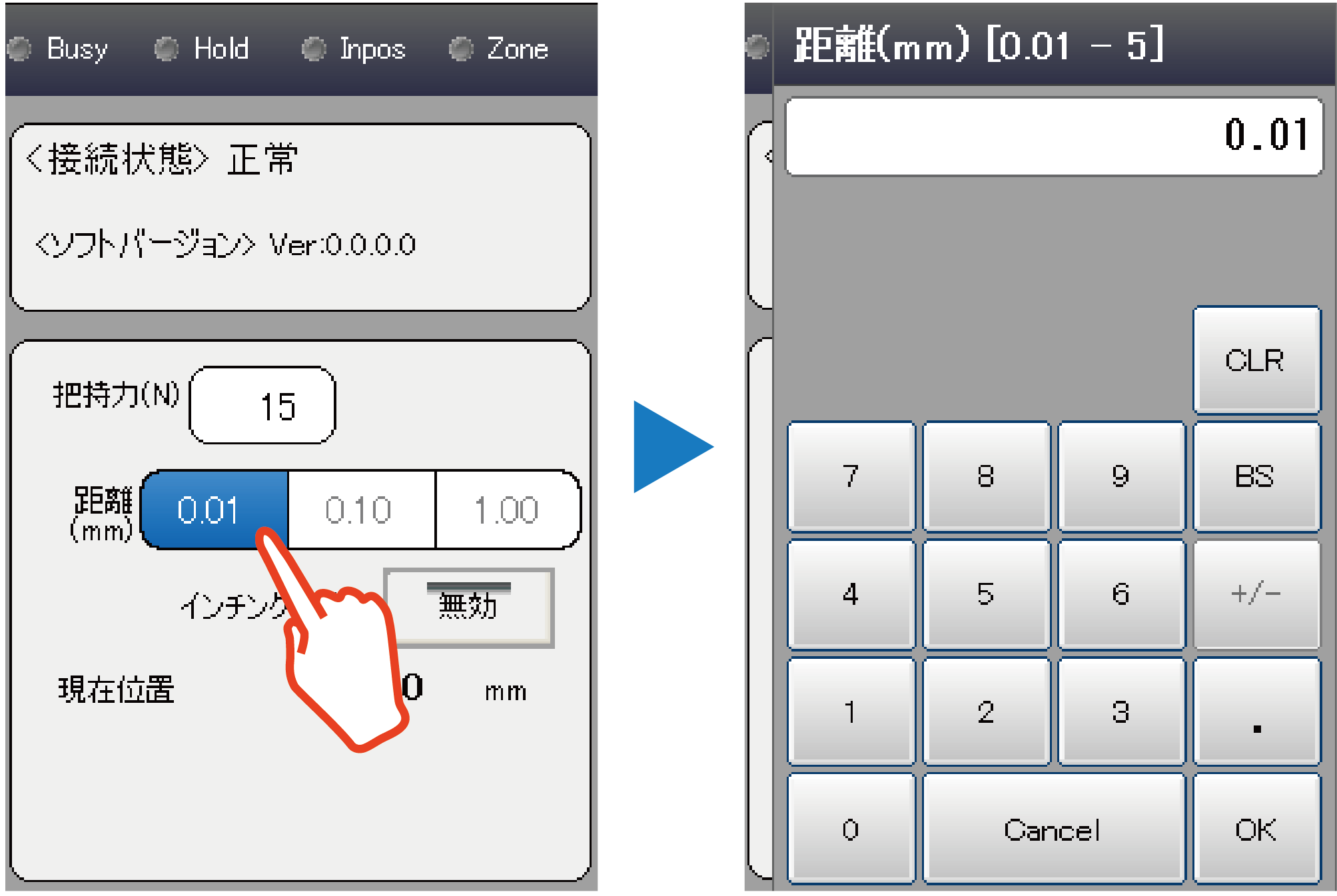
| インチング距離(mm) | インチング動作有効時に動作する距離を設定します。単位は[mm]です。 インチング距離を編集する場合は、選択中のキーを押すとテンキーが表示され、値を設定することができます。設定可能な範囲は0.01mm~5.00mmです。 |
(*1) 把持力(N)の設定値のみ、電源入り切りを行っても保持されます。
(3)ポイントデータ表示
ハンド動作コマンドのHandUnChuck、HandChuckコマンドで使用するポイントデータの設定ができます。
ポイントデータの内容は "HandUnChuck" 、 "HandChuck" コマンドを参照ください。
[アンチャック動作]ボタンと[チャック動作]ボタンは、設定したポイントデータの動作確認用です。
[アンチャック動作]ボタンと[チャック動作]ボタンで動作を実行する場合はOKボタンと動作許可ボタンを同時に押してください。ボタンを離すと動作は停止します。
F1 : 位置取込
ポイントデータの現在の情報を取り込みます。
| モード | ハンドの動作モードです。位置取込ボタンを押した直前のハンドの動作状態に応じて、設定されるモードが自動的に決定されます。
|
|---|---|
| 移動量(mm) | ハンドの現在のフィンガの位置が設定されます。単位は[mm]です |
| 速度(%) | ハンドの動作速度です。すべて100%に設定されます。単位は(%)です。 |
| 把持力(N) | 手動動作の把持力が設定されます。単位は[N]です。 |
位置取込ボタンを押した際は、動作モードの種類に関わらず移動量、速度、把持力の全ての情報がポイントデータに取り込まれます。
F4: ジャンプ
指定したポイント番号のデータがポイント画面に表示されます。
F5:編集
ポイント画面でカーソルがある項目を、編集します。
F6:コピー
現在選択しているポイントの内容をコピーします。
F7: 貼り付け
F6でコピーした内容を選択しているポイントにコピーします。
ID : 7160