
ID : 7272
ダイレクトティーチング
ダイレクトティーチングは、COBOTTAのアームを手で押して移動し、その位置と姿勢を取り込む教示方法です。
以下の手順で行います。
- 変数の教示画面を起動する
- ダイレクトモードに切り替える
- ロボットの位置・姿勢を教示する
- ダイレクトモードを解除する
1. 変数の教示画面を起動する
以下の手順で行います。
1
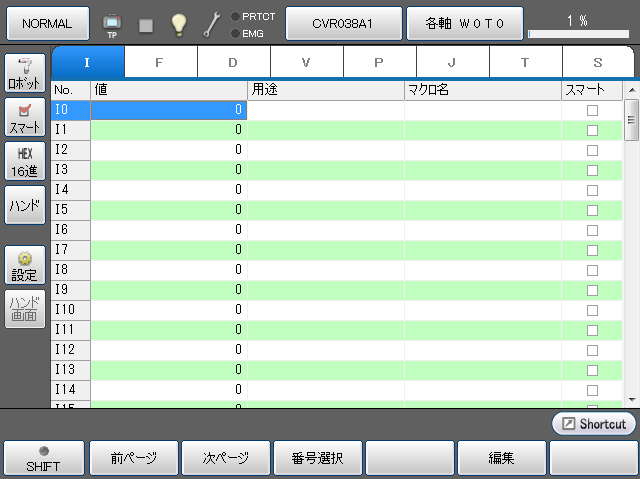
リモートTPまたはバーチャルTPで、下記の経路で、変数画面を開きます。
操作経路:基本画面 - [F3 変数]
2
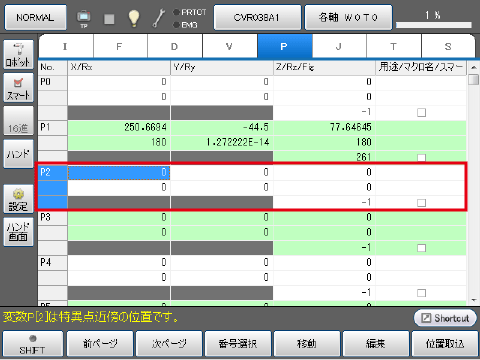
ロボットの位置を教示する変数のタブに切替え、変数番号を選択します。
位置の教示は、P型、J型、T型変数で可能です。
変数番号のデータ部分を押すことで選択ができ、色が青色になります。
操作の詳細についてはTPアプリ操作ガイドの "変数画面の表示・変更" を参照してください。
2. ダイレクトモードに切り替える
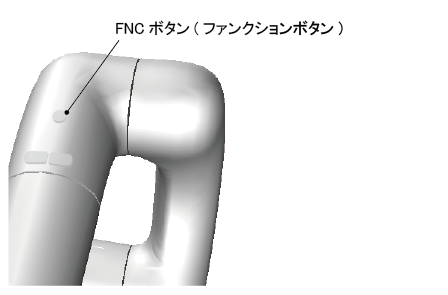
以下のように、画面上でダイレクト準備モードにしてから、アーム上のファンクションボタンを1.5秒以上長押しするとダイレクトモードに切り替えることができます。
3
リモートTP/バーチャルTPの画面で、[NORMAL]表示になっているボタンを押します。
このモードボタンは、下表のように、モードに応じて表示が切り替わります。
| 表示 | モード | 内容 |
|---|---|---|
| NORMAL | 通常モード | アームの手動操作、プログラム起動ができます。 このモード中に、アーム上のファンクションボタンを1.5秒以上長押しすると、ブレーキが解除され、アームを手で押して移動させることができます。再度1.5秒以上長押しするとブレーキロックします。 |
| DIRECT | ダイレクト準備モード | TPアプリやI/Oなどからのロボット操作を禁止します。 |
| ダイレクトモード |
アームを手で押して移動できます。 |
- ファンクションボタンでの、ブレーキ解除/ロックの切り替え、およびダイレクトモード/ダイレクト準備切り替え時に、セーフティ以外のエラー(LEDが黄色点灯)が発生している場合は、エラーがクリアされてから、状態が切り替わります。
- ファンクションボタンは10秒以内に離してください。押し続けると、ボタンが溶着しているエラーになります。
- セーフティのエラー(LEDが赤色)が発生している場合は、状態の切り替えはできません。

4
ダイレクト準備設定画面が表示されますので、必要なものがあれば変更します。
変更ができたら[OK]ボタンを押します。

各項目の内容は以下のようになっています。
先端負荷質量の値は、電源を切るまでは保持しています。
ハンド把持力の値は、電源再投入後も保持しています。
アシストモードは、通常モードへ切り替えるまで保持しています。
| 項目名 | 初期値 | 内容 |
|---|---|---|
| 先端負荷質量(g) | 0 | ワークの質量を設定します。 |
| ハンド把持力(N) | 15 | 電動ハンドの把持力を設定します。 |
| アシストモード | 全軸フリー | 位置や姿勢を維持し続けてティーチングの調整をアシストします。 全軸フリー : 位置と姿勢を自由に変更できます。 |
ボタンが[DIRECT]になり、COBOTTAのLEDが青色の遅い点滅になります。
これで、ダイレクト準備モードへの切り替えは完了です。


5
アーム上のファンクションボタンを1.5秒以上長押しします。
COBOTTAのLEDが青色の点灯になれば、ダイレクトモードへの切り替えは完了です。
- 復帰可能なエラーが発生しているときに、ファンクションボタンを1.5秒以上長押しすると、エラーのクリアが自動的に実施された後、ダイレクトモードへ切り替わります。
ただし、COBOTTAのLEDが赤色に点灯している場合は、上記の手順ではエラーをクリアできません。その場合、TPアプリやI/Oおよび、PacScriptコマンドのいずれかによる、エラーのクリアと動作準備を実施後に、ダイレクトモードへ切り替えてください。 - Ver.2.7.*より古いバージョンでは、復帰可能なエラーが発生しているときに、ファンクションボタンを1.5秒以上長押しすると、エラーのクリアが実施されますが、ダイレクトモードに切り替わりません。もう一度、ファンクションボタンを1.5秒以上長押しすることで、ダイレクトモードへ切り替わります。
- RC8 プロバイダの"GetDirectMode"コマンドでも、ダイレクトモードかどうかを確認することができます。詳細は、"RC8プロバイダユーザーズ ガイド"を参照してください。

3. ロボットの位置・姿勢を教示する
以下の手順で行います。
なお、ここではロボットの位置・姿勢の教示について説明します。ハンドの教示も合わせて行う場合は、電動ハンドの "ロボットの位置教示とポイントデータ教示の連動" を参照してください。
6
COBOTTAのアームを手で押して移動します。
ソフトリミットに近づくと、COBOTTAのLEDが黄色の遅い点滅になり、ソフトリミットを超えると、黄色の速い点滅になります。
また、特異点に近づく場合もLEDが黄色の遅い点滅になります。

7
教示する位置・姿勢になったら、COBOTTAのアーム上のファンクションボタンを押すか、変数画面の位置取込ボタンを押します。
ロボットの位置情報が変数データに取り込まれます。
8
Step6~Step7を繰り返し、必要な位置・姿勢の教示を行います。
位置情報が取り込まれる変数の番号は、COBOTTAのアーム上のファンクションボタンを押すごとに、自動的に繰り上がっていきます。ただし、設定された変数の上限まで達すると、それ以上は繰り上がりません。上書きしないように注意してください。
変数画面の位置取込ボタンを使用する場合は、変数の番号が自動的に繰り上がることはありません。変数を選択してから、変数画面の位置取込ボタンを押す必要があります。
全ての位置・姿勢の教示が完了したら、この作業は終了です。
4. ダイレクトモードを解除する
ダイレクトモードおよびダイレクト準備モードを解除しないと、アームの手動操作やプログラムの実行ができません。
ダイレクトモードおよびダイレクト準備モードを解除する場合は、画面上の[DIRECT]表示されているボタンを押します。
通常モードに戻るときは、COBOTTAから十分離れて安全を確保してしてください。特権タスクやPLCなどからのプログラム起動によって、お客様の意図しないタイミングでロボットが動く可能性があります。
ダイレクトモードおよびダイレクト準備モードが解除されると、通常モードになります。画面上では、ボタンが[NORMAL]表示になります。アーム上のLEDは、青色以外の、その時の状態に応じた色に変わります。

ID : 7272
- このページに関連する情報
- アシストダイレクト機能