
ID : 5171
依从功能的使用方法
依从功能的使用方法如下所示。
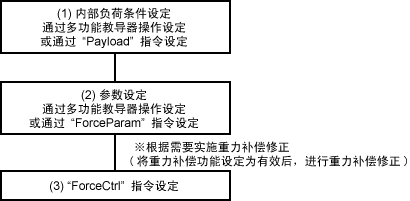
(1)内部负载条件设定
通过1或2的方法设定“前端负载质量”和“负载重心位置”。
(2)参数设定
通过1或2的方法设定参数。
- 通过多功能教导器设定。
- 通过“ForceParam”指令设定。
如果控制器电源OFF,则通过“ForceParam”指令进行的参数设定返回到设定前。
(3)“ForceCtrl”指令设定
通过“ForceCtrl”指令设定“有效/无效”。
重力补偿修正(GrvOffset)
ForceCtrl时将机器人停止状态的扭矩和重力补偿扭矩进行比较并修正误差部分。但是,如果机器人在受外力(由于接触等)影响状态下执行ForceCtrl,则修正值会产生误差。请在不受外力(重力除外)的状态下执行ForceCtrl。在受外力的状态下设定力限制有效时,应通过GrvCtrl将重力补偿设定为有效后再使用GrvOffset。
ID : 5171