
ID : 5170
不利用力感应器的力量控制功能
不利用力感应器的力量控制功能是下面的功能。
本功能不是机器人与人碰撞、接触时降低其力量的安全功能。
依从功能
机器人或其附带的工具等的动作可灵活应对外部作用的功能。
该功能可在以下机型中使用。
| 分类 | 机型 |
|---|---|
| 6轴机器人 | VM、VS、VS-6556/6577、VP |
如果不使用依从功能,在作业过程中零部件间的相互撞击或与装备等对象物接触,造成机器人前端位置与目标位置偏移时,机器人继续向目标位置移动,则会发生错误,造成电机OFF或工件破损。
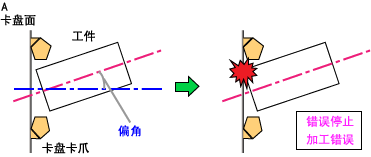
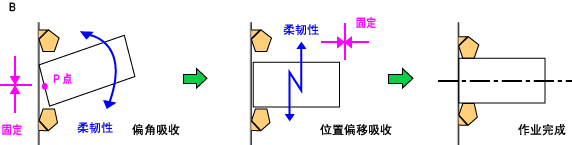
为防止发生以上不良情况,通过依从功能可吸收位置偏移,进而防止错误发生(参照B)。
ID : 5170
- 本页相关信息
- 安全相关注意事项
- 依从功能的使用方法
- 通过多功能教导器设定的步骤
- 参数一览
- 调整方法
- 执行示例(编程示例)