
ID : 1995
设置步骤
协调功能的设置步骤如下所示。
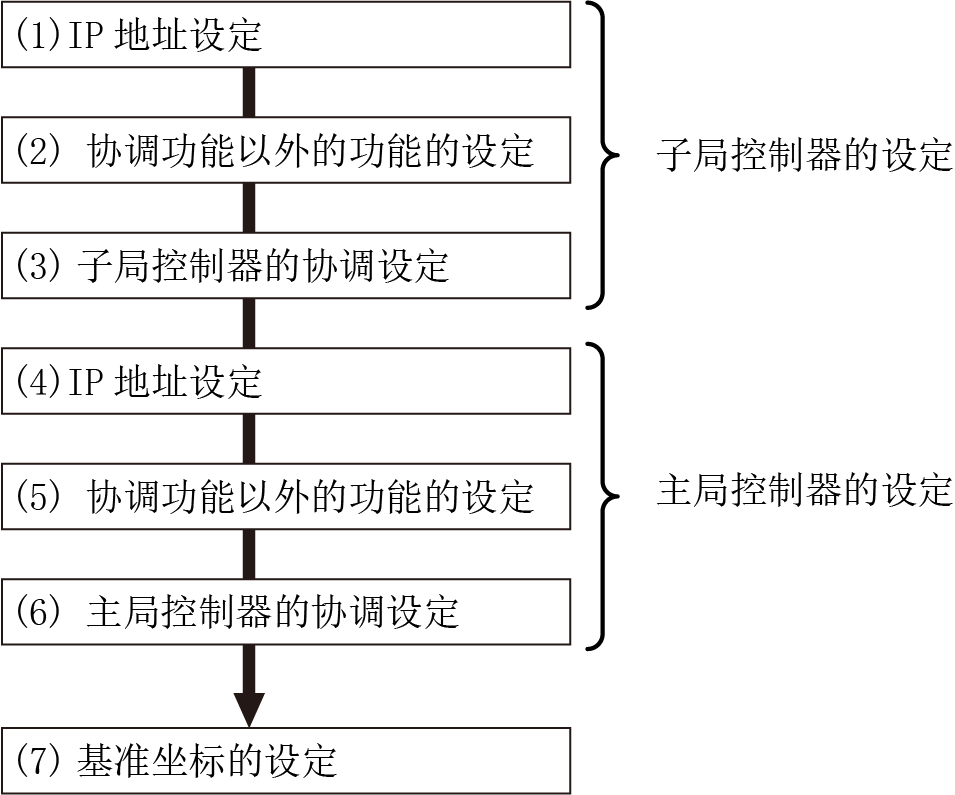
子局控制器的设定
使用多功能教导器进行设定。
(1) IP地址的设定
设定子局控制器的IP地址。
关于IP地址的设定方法,请参照多功能教导器操作指南中的“通信设定画面的显示、变更”。
子局控制器的IP地址中不能使用DHCP。
(2) 协调功能以外的功能的设定
除了协调功能之外,如果通过子局控制器使用附加轴及电动夹治具等,设定这些功能。请浏览以下参照位置。
- 关于附加轴的设定方法,请参照附加轴使用说明书中的“附加轴起动步骤(滚珠丝杠)”。
- 关于外部附加轴的设定方法,请参照外部附加轴(EtherCAT)使用说明书的“参数设定”。
- 电动夹治具的设定方法请参照“在协调功能中使用电动夹治具的方法”。
- 力感应器的设定方法请参照“在协调功能中使用力感应器的方法”。
- 有关同时进行协调功能和排他控制时的设定方法,请参照“协调功能时的排他控制设定方法”。
(3) 子局控制器的协调设定
进行协调功能中所需的许可证输入和子局控制器的协调设定。
设定完成后切断控制器电源,拆下教导器后重启。
主局控制器的设定
(4) IP地址的设定
设定主局控制器的IP地址。
设定方法与子局控制器的IP地址设定方法相同。
(5) 协调功能以外的功能的设定
除了协调功能之外,如果通过主局控制器使用附加轴及电动夹治具等,设定这些功能。
设定方法与在子局控制器的设定方法相同。
(6) 子局控制器协调设定
输入协调功能中所需的许可证,协调设定主局控制器,以及注册子局控制器的IP地址。
(7) 基础坐标的设定
设定主局机器人和子局机器人各自的基础坐标。
ID : 1995