
ID : 3316
在协调功能中使用力感应器的方法
该功能可以从机器人控制器软件版本2.5.*以上开始使用。
利用连接到主局控制器的多功能教导器,可以对连接到各机器人控制器的力感应器进行设定。
此外,在编程时可以使用Robot名,指定读入哪一个力感应器的信息。
这里就上述内容,分以下项目进行说明。
设定方法
虽然基本上可以从主局控制器进行设定,但是以下内容请通过相应的机器人控制器进行。
- 利用力感应器的力量控制功能软件许可证请通过其许可对象的机器人控制器进行注册。例如,购买Robot1(子局控制器)用许可证时,请通过Robot1的机器人控制器进行注册。
- 在与力感应器进行通信中使用的RS-422A通信设定请通过装有RS-422A通信板或是RS-422A微型转换器的机器人控制器进行注册。
许可证注册
在各机器人控制器中,只要将许可证注册到任意一个机器人控制器,就可使用所有力感应器。
请将多功能教导器或小型教导器连接到购买的许可对象机器人控制器,再注册许可证。
例如,购买Robot1(子局控制器)用许可证时,请将多功能教导器或小型教导器连接到Robot1的机器人控制器再进行注册。
RS-422A的通信设定
在RS-422A的通信设定中,请利用装有RS-422A通信板或RS-422A微型转换器的机器人控制器进行将FIFO缓冲设为有效的操作。
例如,将RS-422A通信板安装到Robot1(子局控制器)。在这种情况下,请将多功能教导器或小型教导器连接到Robot1的机器人控制器,将FIFO缓冲设为有效。
FIFO缓冲的设定方法请参照“将FIFO缓冲设为有效”。
机器人的选择
连接到主局控制器的多功能教导器设定基本上都是针对指定为领导的机器人进行。
因此,在设定连接到子局控制器的力感应器时,将该子局控制器的机器人指定成领导。
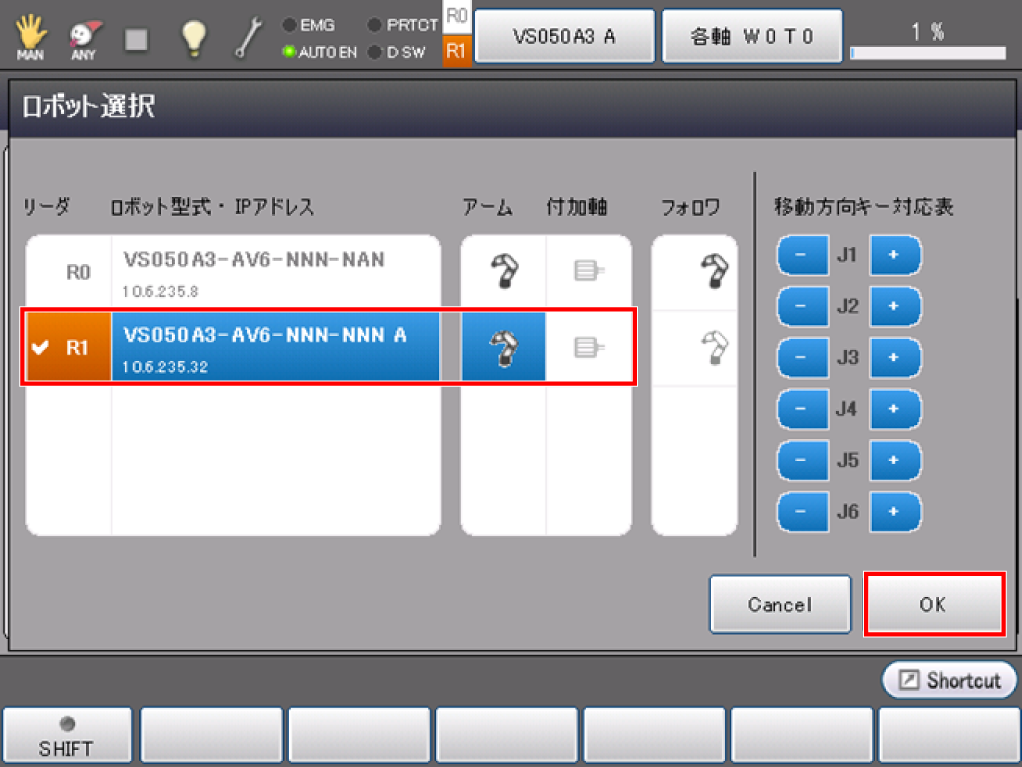
以下画面为使2台机器人联动时的画面。
按下画面上方的“机器人选择”按钮,选择机器人名“R1”,再按下“OK”,就可以将Robot1设为领导。
关联机器人名和力感应器
根据使用RS-422A通信板或是RS-422A微型转换器的不同,思路就会改变。
请浏览以下参照位置。
其它设定
请设定“参数的设定”以及带力感应器的依从功能的参数设定”、“带力感应器的鲁棒依从功能的参数设定”的内容。
关于指令
在力量控制的指令前附上机器人名使用。
例如,复位Robot0的力感应器时
描述为Robot0.ForceSensor 0。
ID : 3316