
ID : 1996
子局控制器的协调设定
进行协调功能中所需的许可证输入和子局控制器的协调设定。
子局控制器协调功能的许可证是免费的。
关于许可证的获取方法,请参照“选项功能和许可证”。
协调功能的许可证追加
操作路径:[F6 设定]-[F8 选项]-[F1 扩展功能]
在控制器上追加协调功能的许可证。
详细内容请参照选项的“许可证登录”。
控制器的设定
操作路径:[F6 设定] - [F9 协调]
要执行该操作,请将用户等级指定为“维护”。
如果按照上述操作路径操作,则显示以下“协调设定”视窗。
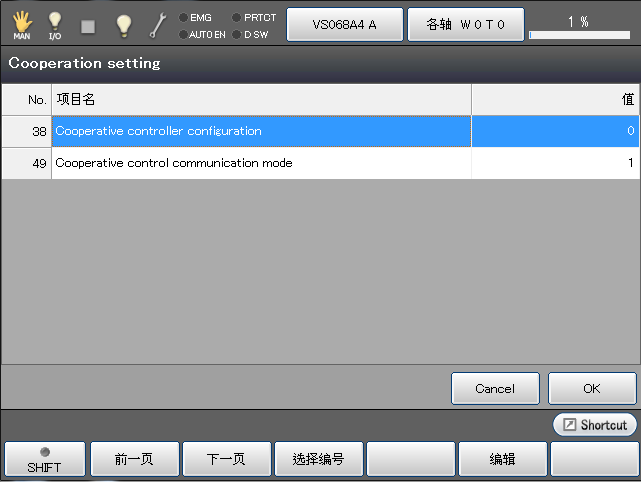
在“协调设定”视窗,进行以下的设定。
| 协调控制器设定 | 设定子局控制器的控制器编号。
例如,设定“子局控制器1 : 2”时,连接到该子局控制器的机器人名为“Robot1”。 |
||||||||
|---|---|---|---|---|---|---|---|---|---|
| 协调控制通信模式 | 设定机器人控制器间的通信方法。针对通信方法的设定值如下所示。
当机器人控制器的软件版本为2.3.*以上时,1:将“并用Ethernet与EtherCAT”设为默认。 只使用Ethernet时,请将协调控制通信模式的值改为“0”。 |
拆下教导器后重启
设定完成后,切断控制器的电源,拆下教导器,安装代用教导器的连接器。主局控制器地协调设定结束后,子局控制器也会与主局控制器同时启动。
ID : 1996