
ID : 2954
参数的设定
只有WINCAPSIII可以进行使外部附加轴动作的设定。按照以下步骤进行设定,将参数发给机器人控制器。
将型式改为有附加轴
若是无附加轴的机器人型式(型式中无“I”),请改为有附加轴的机器人型式。
操作路径:[项目]-[属性]
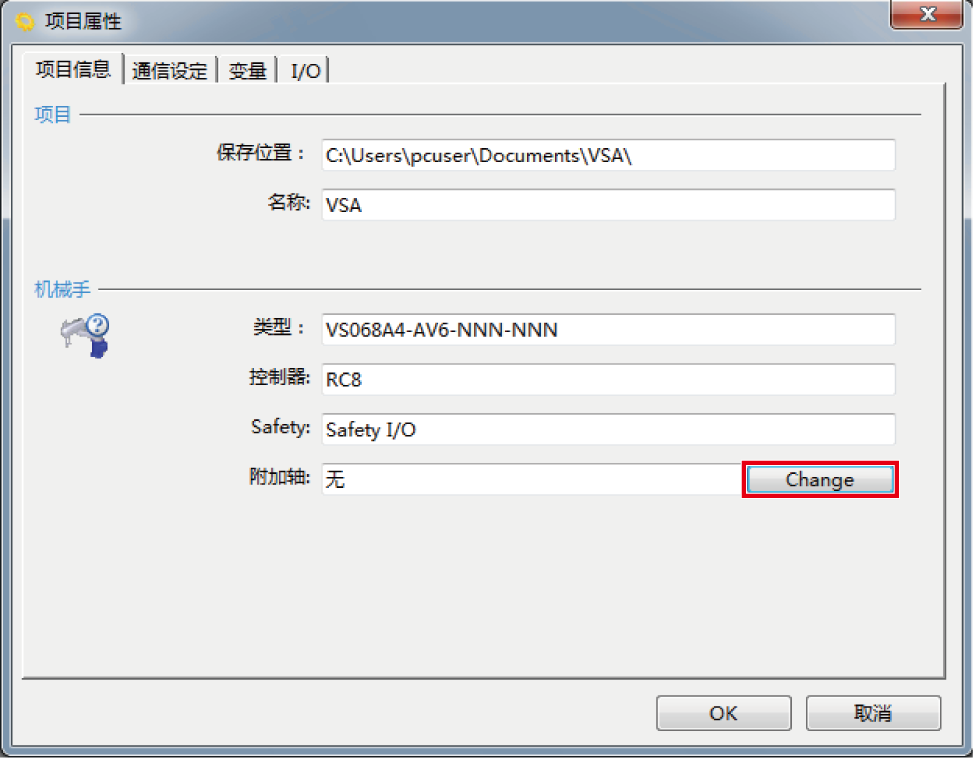
为了将UL支持的机器人控制器的型式改为有附加轴,需要更换硬件零部件。请咨询本公司营业部门。
设定外部附加轴参数
请设定轴连接设定、外部轴型式、编码器分辨能力。
操作路径:[项目]-[轴设定表]
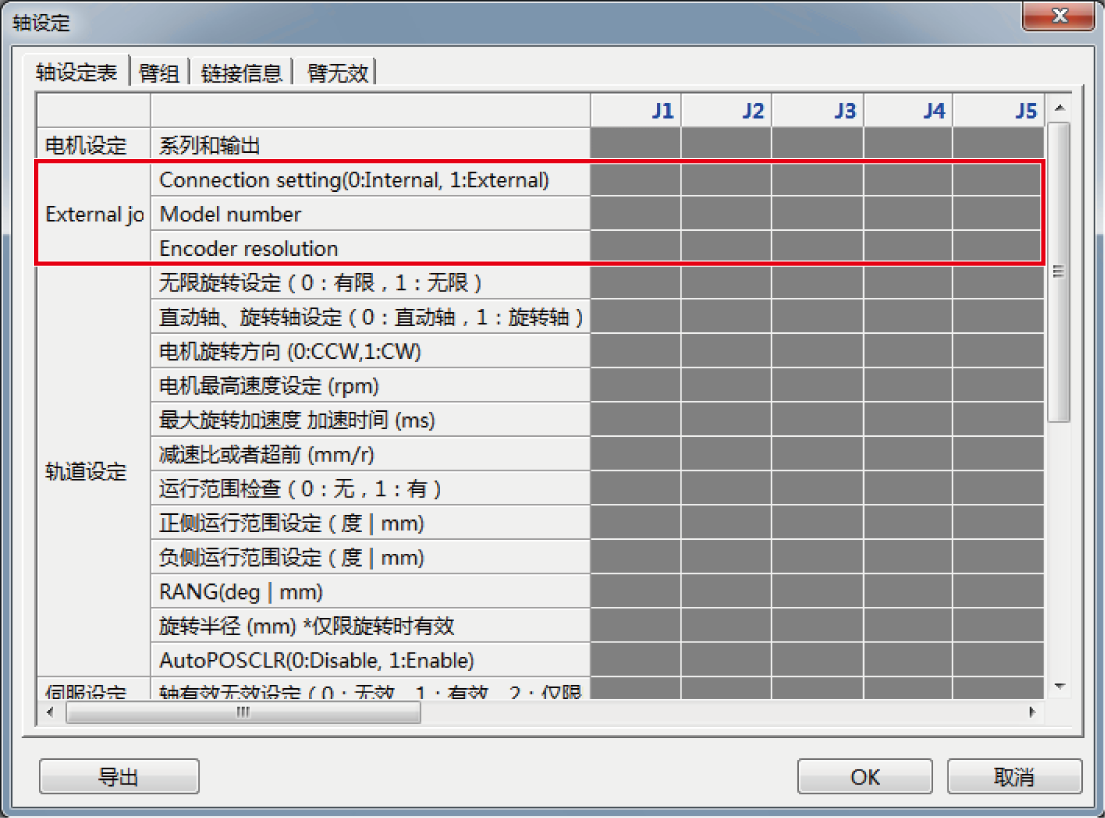
轴连接设定
0:内部
1:外部
请将想作为外部附加轴动作的轴设为“1:外部”。
在Ver.2.2.*版本中,可设为“1:外部”的轴数最多2个。
| 轴连接设定 | 设定范围 | 默认值 |
|---|---|---|
| 值 | 0~1 | 0 |
在将电机型式编号设到编码器的状态,请不要将轴连接设定设为“1:外部”。
外部轴型式
0:无
1:山洋电气
2:安川电机
3:Delta电子(Ver.2.5.*以上版本可以使用)
4:Panasonic(Ver.2.5.*以上版本可以使用)
5:HIWIN(从Ver.2.7.*起可用)
请设定想作为外部附加轴动作的厂家。
在Ver.2.2.*版本中,由多个轴使用外部附加轴时,请统一设定同一厂家。
| 外部轴型式 | 设定范围 | 默认值 |
|---|---|---|
| 值 | 0~5 | 0 |
编码器分辨能力
请选择编码器分辨能力。列表中没有时,请直接输入。
选择线性电机时
请设定编码器分辨率、最大电机转速、齿轮比、导程长度。
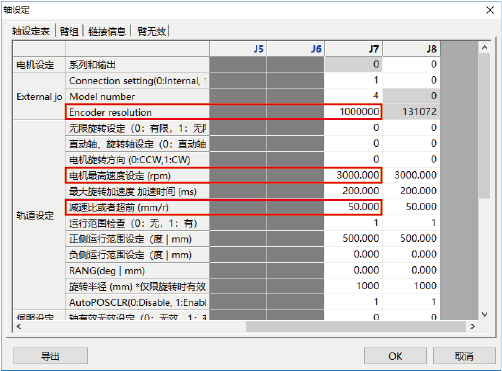
| 编码器分辨能力 | 1000000(固定值) |
|---|---|
| 最大电机转速 | 最大速度(单位:mm/min)/导程长度(单位:mm) |
| 齿轮比、导程长度 | 间距×1000000(单位:mm) |
(例)最高速度度0.3m/s、间距0.1mm时
编码器分辨率:1000000
轮比、导程长度:0.1 × 1000000 = 100000
最大电机转速:0.3 × 1000 × 60 / 100000 = 0.18
向机器人控制器发送参数
参数设定完成后,请向机器人控制器发送参数,重启机器人控制器。
当参数设定与实际的硬件连接构成不同时,EtherCAT通信建立不起来,将发生错误。
(例:参数设定了2个外部附加轴,但实际上只连接了1个轴)
ID : 2954