
ID : 2284
协调功能时的设的排他控制定方法
同时进行排他控制和协调功能时,将协调功能的主局控制器作为排他控制的主局控制器使用。
并用协调功能和排他控制功能时,机器人控制器的软件版本需2.0.*以上。
步骤
进行排他控制的设定后,进行协调功能的设定。
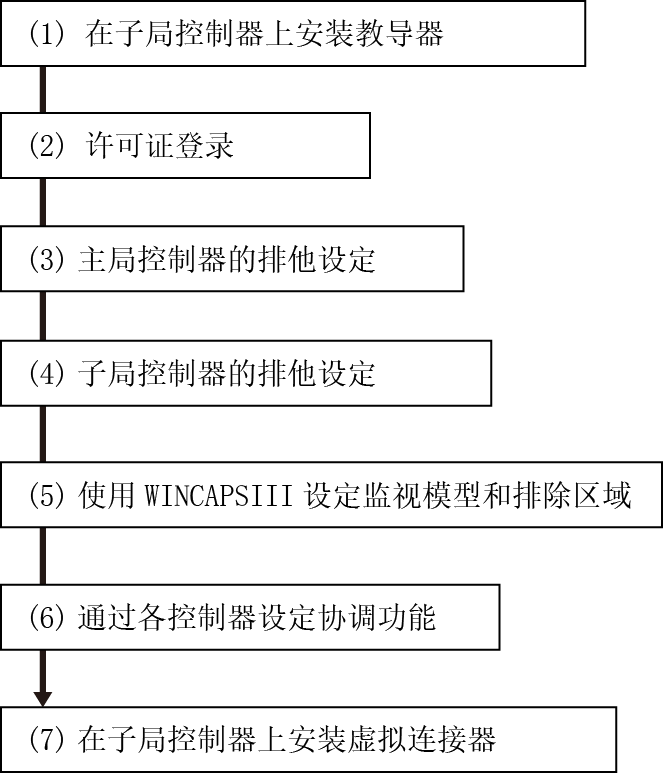
(1)将教导器安装至子局控制器
关闭子局控制器的电源。
拆下安装的虚设连接器,安装多功能教导器后,接通子局控制器的电源。如果出现错误,请解除。
(2)许可证登录
在各控制器上登录排他控制和协调功能的许可证。主局/子局控制器需要分别登录。
关于输入操作,请参照选项的“许可证登录”。
如果已经登录许可证,则无需进行该操作。
(3) 主局控制器的排他设定
通过主局控制器进行排他的设定。
操作路径:基本画面 - [F2 机械臂]-[F6 辅助功能]-[F11 排他控制] - [F2 排他通信设定]
请按以下内容进行设定。
| No. | 项目名 | 设定内容 | |
|---|---|---|---|
| 329 | 排他控制控制器设定 | 设定为“1 : 主局”。 |
|
| 330 | 排他控制IP(0)[IP Address] | Robot0的设定 | 针对各机器人设定是否纳入排他组。
|
| 331 | 排他控制IP(1)[IP Address] | Robot1的设定 | |
| 332 | 排他控制IP(2)[IP Address] | Robot2的设定 | |
| 333 | 排他控制IP(3)[IP Address] | Robot3的设定 | |
| 346 | 排他控制机器人编号(0) | Robot0的设定 | 设定利用协调功能使其联动的机器人的机器人名称。不联动的机器人设定“1”。
|
| 347 | 排他控制机器人编号(1) | Robot1的设定 | |
| 348 | 排他控制机器人编号(2) | Robot2的设定 | |
| 349 | 排他控制机器人编号(3) | Robot3的设定 | |
参数详细内容请参照参数表中的“VRC”。

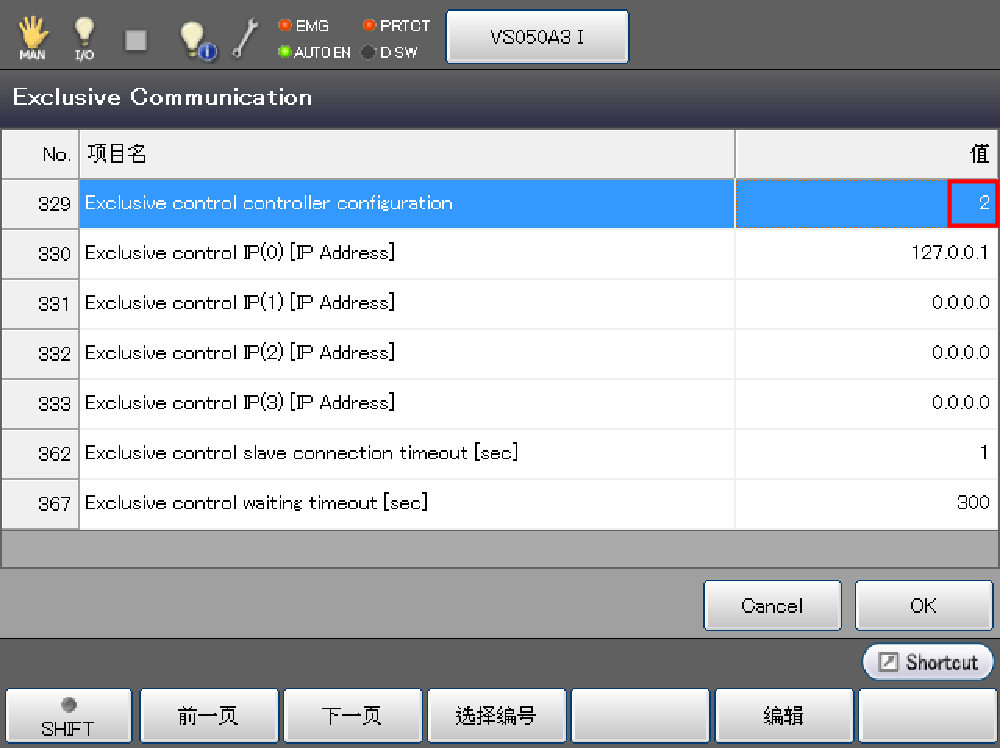
(4) 子局控制器的排他设定
通过子局控制器设定排他的子局控制器。
操作路径:基本画面 - [F2 机械臂]-[F6 辅助功能]-[F11 排他控制] - [F2 排他通信设定]
将以下参数设定成指定值。
| No. | 项目名 | 值 | 内容 |
|---|---|---|---|
| 329 | 排他控制控制器设定 | 2 | 将该控制器作为子局控制器使用。 |
(5) 通过WINCAPSIII设定监视模型和排除区域
利用WINCAPSIII分别对主局用项目和子局用项目设定监视模型和排除区域。创建后,将PC连接至各自的控制器,发送项目数据。
详细的通信方法请参照协调功能指南的“协调控制、双臂工具”。
(6)通过各控制器设定协调功能
协调功能的详细设定方法请参照协调功能指南的“设置步骤”。
(7)在子局控制器安装虚设连接器
关闭主局/子局控制器电源。
拆下安装在子局控制器上的教导器,安装虚设连接器后,同时接通主局/子局控制器的电源。重启后,排他控制和协调功能有效。
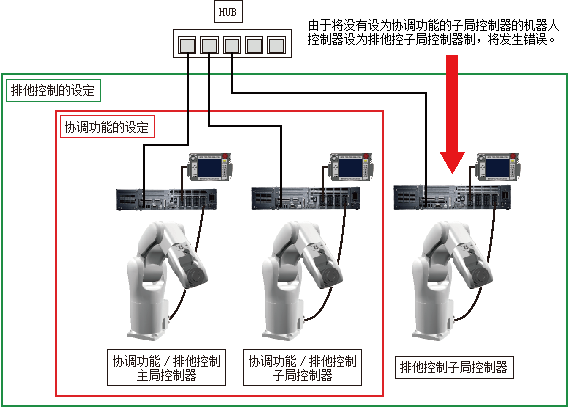
系统构成时的注意
可设为排他控制的主局控制器的机器人控制器
可设为排他控制的主局控制器的机器人控制器仅限协调功能的主局控制器。
可设为排他控制的子局控制器的机器人控制器
可设为排他控制的子局控制器的机器人控制器仅限协调功能的子局控制器。
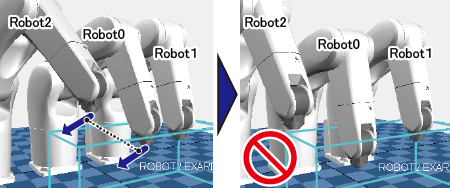
例如,如果如下图所示设定各机器人控制器,最右边的机器人控制器发生错误。
使用协调指令时的注意事项
根据机器人控制器的软件版本不同,注意事项会有差异。
Ver.2.0.*~Ver.2.3.*
执行同步动作(使用SyncTime指令的动作)及协调动作(使用“SyncMove”动作选项的动作)时,需要在执行前通过ResetExclusiveArea指令将排除区域设为无效。
Ver.2.5.*或更高版本
在将排除区域设为有效的状态下,可以执行同步动作(使用SyncTime指令的动作)及协调动作(使用“SyncMove”动作选项的动作)。
但是,如果因同步动作或协调动作,有多个机器人进入排除区域,这些机器人在移动到排除区域外之前只可进行同步动作或协调动作。
相反的模式也一样,如果因同步动作或协调动作之外的动作,机器人进入排除区域,该机器人在移动到排除区域外之前只可进行同步动作或协调动作之外的动作。
不同模式的详细内容如下所示。
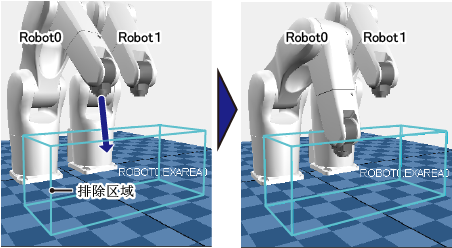
由于同步动作或协调动作进入排除区域时
- 进入排他区域时的动作
-
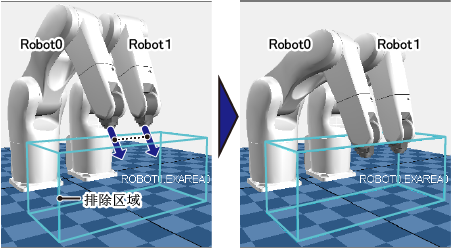
利用同步动作或协调动作而使Robot0和Robot1进入排除区域。
(也包括只有当中一个机器人进入排除区域的情形。)
- 之后的动作
-
可能的动作 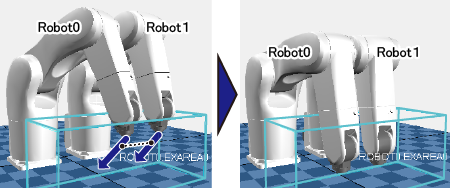
使Robot0和Robot1进行同步动作或协调动作。
在排除区域内使多个机器人动作。请注意不要让机器人相互碰撞(尤其在同步动作时)。
利用同步动作或协调动作,使Robot0和Robot1动作到排除区域外后,再让各机器人单独动作(上图中让Robot0单独动作)。
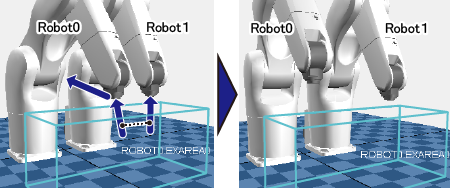
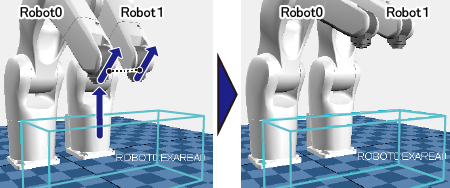
不可以进行的动作 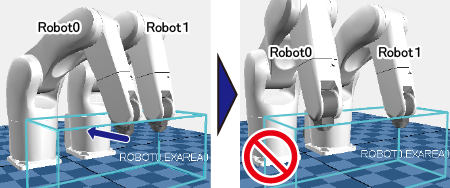
使机器人单独动作(上图中让Robot0单独动作)。
使其与其他机器人同步动作或协调动作(在上图中,使Robot0和Robot2同步动作或协调动作)。
在上图中,也不能让Robot0和Robot1以及Robot2同步动作或协调动作(增加要联动的机器人时)。
还有,以同步动作或协调动作使Robot0、Robot1及Robot2动作,进入排除区域时,也无法进行只有Robot0和Robot1的同步动作或协调动作(减去要联动的机器人时)。
由于同步动作或协调动作之外的动作进入排除区域时
- 进入排他区域时的动作
-
使Robot0单独进入排他区域。
- 之后的动作
-
可能的动作 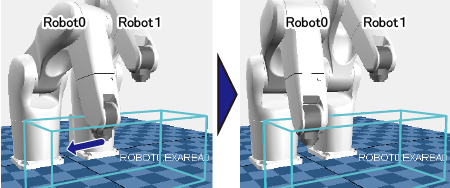
单独使Robot0动作。
使Robot0单独动作到排除区域外后,使其与其他机器人进行同步动作或协调动作(在上图中,使Robot0和Robot1同步动作或协调动作)。
不可以进行的动作 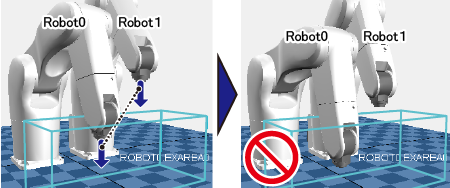
使其与其他机器人同步动作或协调动作(在上图中,使Robot0和Robot1同步动作或协调动作)。
ID : 2284